

Anti-collision control method for leaves of multileaf collimator
A multi-leaf collimator and control method technology, applied in the field of medical electronics, can solve the problems of hazards, increase the leakage of rays from the end faces of incompletely closed leaves, and achieve the effect of preventing collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Attached below figure 1 to attach Figure 5 The present invention will be further described.
[0024] The multi-leaf collimator blade anti-collision control method comprises the following steps:
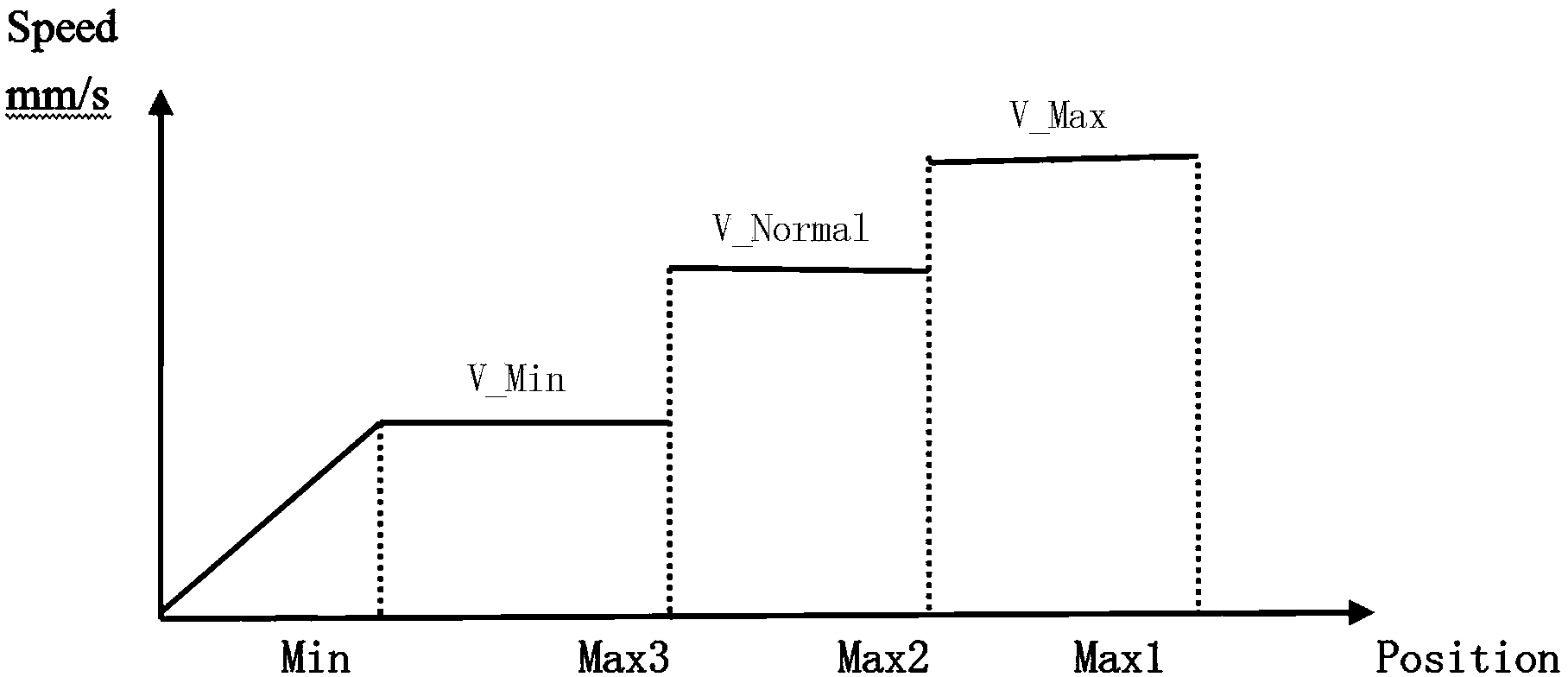
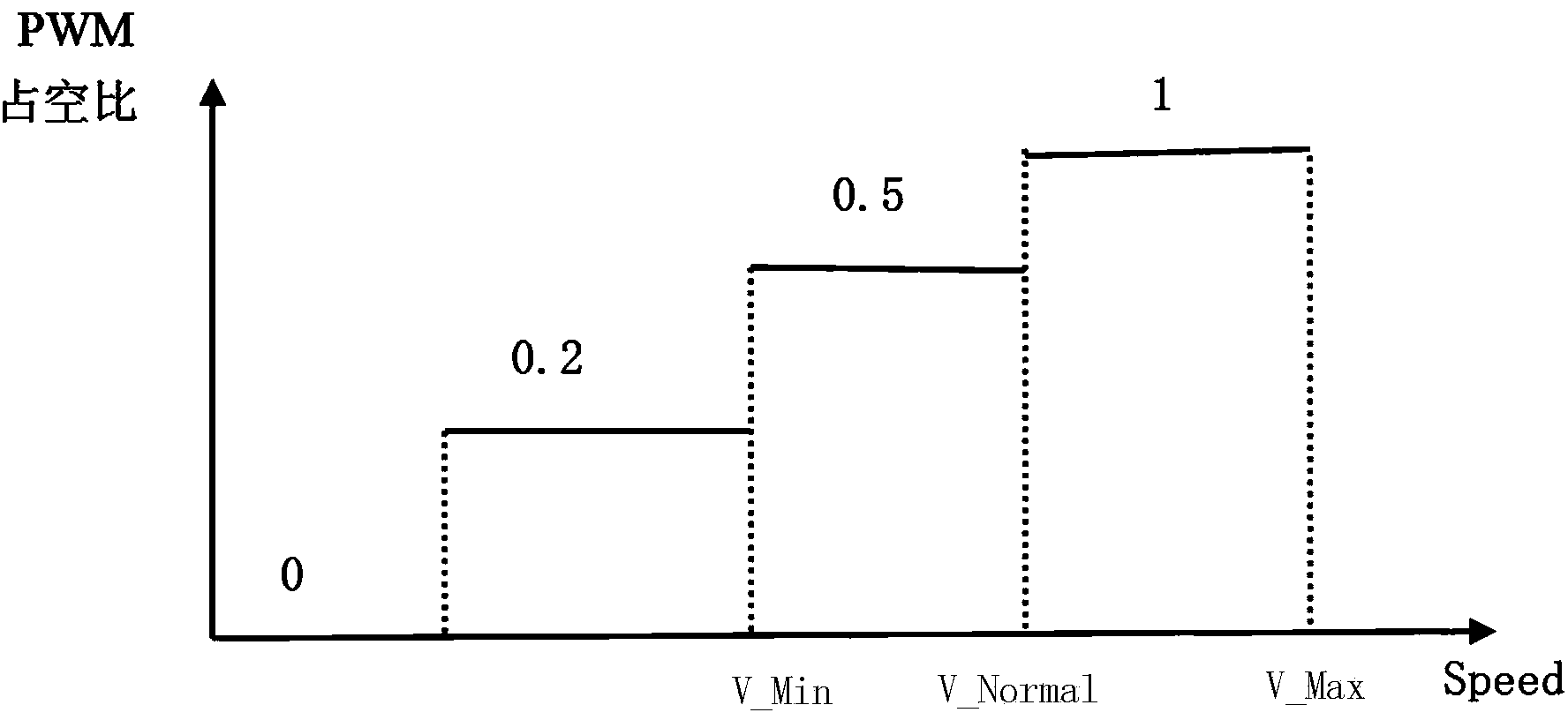
[0025] (1) At present, for the non-switching multi-leaf collimator, the movement of the blades is completed by the motor driving the lead screw, and the rotation motion of the motor is converted into the linear motion of the blades through the lead screw. The movement speed of the motor is carried out by means of pulse width modulation (PWM). Therefore, for the convenience of calculation, the moving distance of the blade can be converted into the number of encoder pulses. The minimum distance between the two groups of leaves of the multi-leaf collimator A and B is set to 0.1mm when they are closed, according to the formula Calculate the positioning error e of blades A and B, where N is the number of pulses sent by the encoder when the blade runs 1mm. Assuming that 1mm co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More