

Multi-robot cooperative positioning algorithm based on square root unscented kalman filter
An unscented Kalman and multi-robot technology, applied in instruments, navigation computing tools, navigation, etc., can solve problems such as difficult to balance positioning accuracy and real-time performance, shorten algorithm time consumption, reduce computational complexity, and ensure positive semi-definite Effects on Sexuality and Numerical Stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
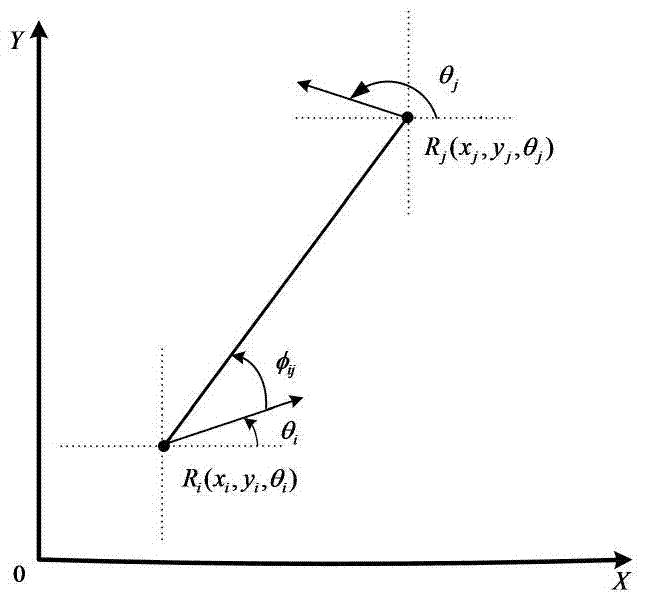
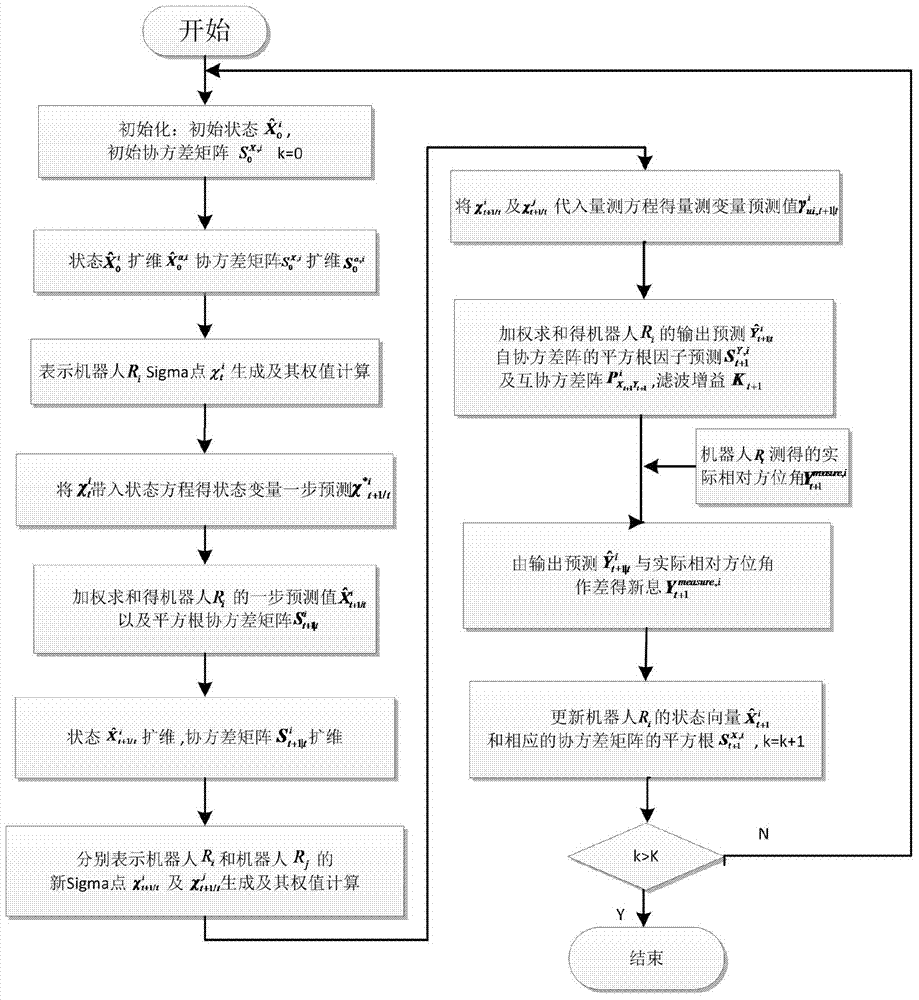
[0024] combine figure 2 , a multi-robot co-localization algorithm based on the square root unscented Kalman filter, first considers the situation that a queue composed of N robots moves in different directions in a two-dimensional environment, and the N robots are in the same position when exploring the environment. In order to meet the requirements of co-location and system observability, each robot needs to meet the following conditions: (1) Unobstructed movement in a two-dimensional environment, each robot is equipped with a built-in sensor for measuring its own position change (use a rotary encoder to measure the rotation angle , the ruler encoder measures the displacement per unit time); (2) Each robot is equipped with an external sensor, which can detect and identify the surrounding robots and measure the relative orientation information (using a laser rangefinder for detection, using a panoramic camera to cooperate with the robot on the Different visual markers are use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More