

CCD-based method and system for automatic identification and track planning of pipeline space weld seams
An automatic identification and trajectory planning technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of unsuitable space welds, rare research and application, and inability to weld, so as to avoid limitations Sex, reduce manufacturing cost and time cost, and reduce labor force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the purpose, technical solutions and beneficial effects of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings, but the implementation of the present invention is not limited thereto.
[0033] The CCD-based automatic identification and trajectory planning method of pipeline space welds in the present invention comprises the following steps:
[0034] (1) Select the welding module: select pipe-pipe butt joint or pipe-pipe intersecting welding on the main control computer;
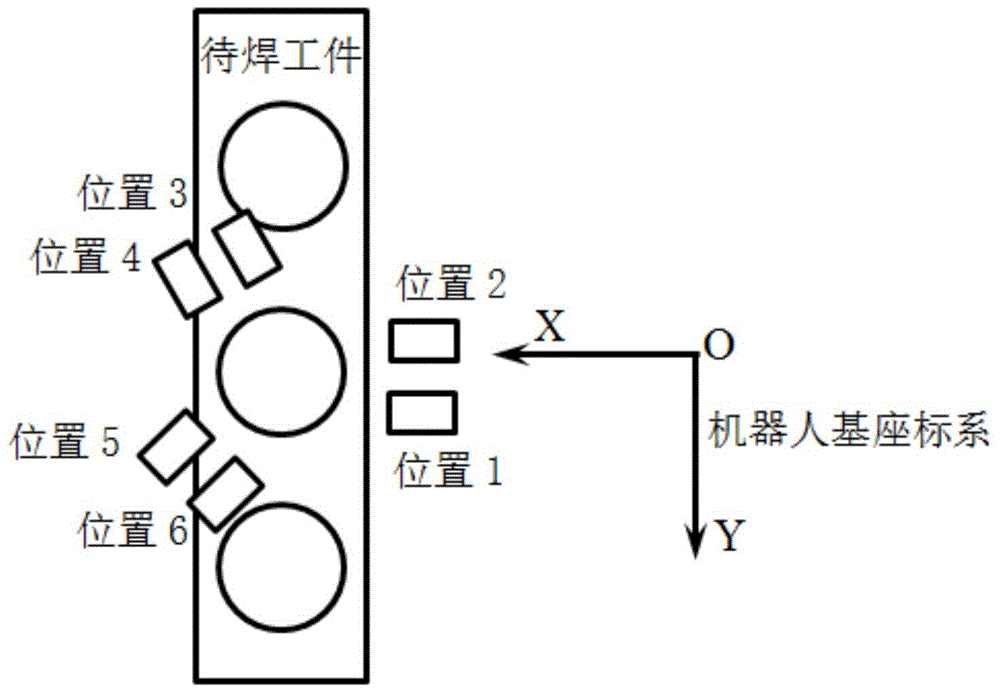
[0035] (2) Collect pictures of workpieces to be welded: adopt the method of "one eye and two positions" to collect pictures of workpieces to be welded, the main control computer sends signals to the welding robot, and the welding robot moves to 6 different shooting positions successively. The specific shooting positions are as follows: figure 1 As shown, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More