

Operation counter-force simulation and control system for remote operation system
A control system and control system technology, applied in the field of remote control system control reaction force simulation, can solve the problems of control mechanism shaking, failure to realize control force characteristic simulation, system oscillation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
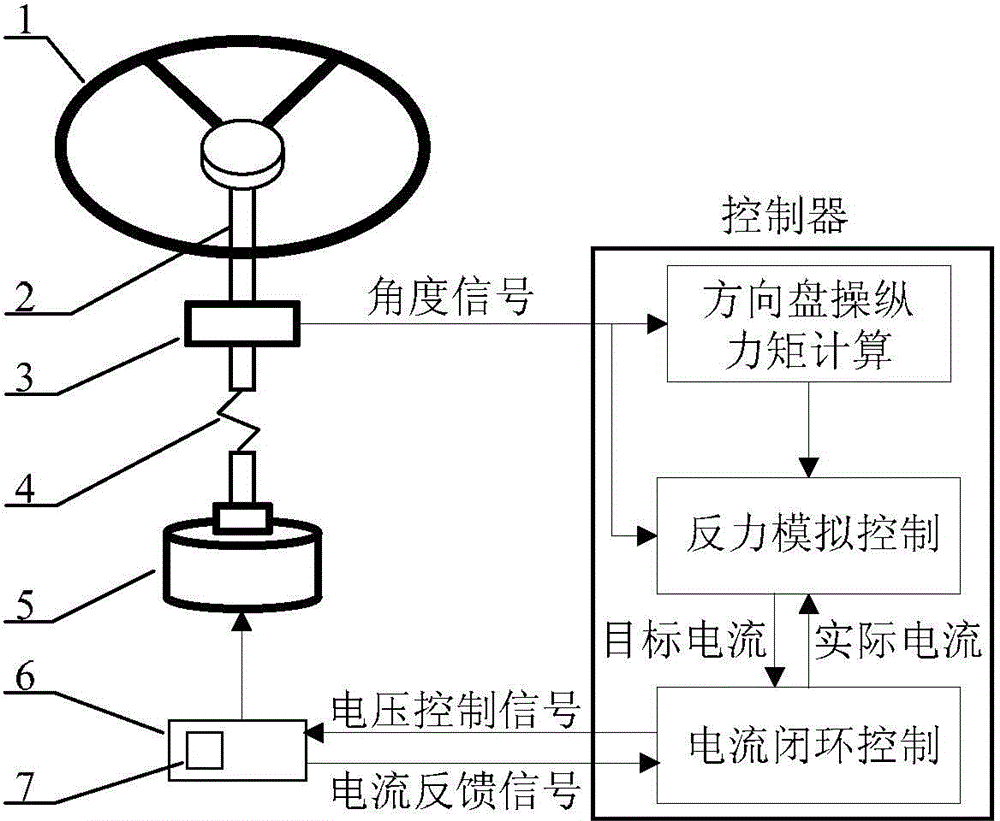
[0035] The application of the present invention in the steering-by-wire technology of automobiles will be further described below in conjunction with the embodiments shown in the accompanying drawings, so as to help those skilled in the art further understand the present invention. It should be noted that the field of application of this invention is not limited to the steering-by-wire technology of automobiles, and can also be applied to remote control systems in other fields such as virtual surgery and remote control of robots. For example, in the field of virtual surgery, through the simulation of real surgical scenes, with the help of certain tactile and visual interaction devices, doctors can perform surgical simulation and surgical training in a virtual environment. Motion and force information, on the other hand, transmit the force information of the scalpel to the surgeon through the force feedback actuator, thereby enhancing the doctor's sense of manipulation and touch...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More