Flying robot for remote sound signal acquisition
A flying robot and sound signal technology, applied in the field of flying robots, can solve the problems of inconvenient layout and insufficient sound acquisition distance, and achieve the effect of improving efficiency, accurate and fast sound acquisition, and maintaining integrity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The preferred embodiments will be described in detail below in conjunction with the accompanying drawings. It should be emphasized that the following description is only exemplary and not intended to limit the scope of the invention and its application.
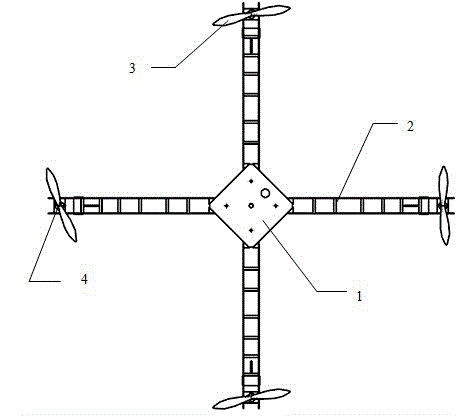
[0034] Such as figure 1 As shown, the present invention is a flying robot for long-distance sound signal acquisition, including a quadcopter. The quadcopter includes a central body 1, four sets of support arms 2, four sets of propellers 3 and four pairs of brushless coaxial motors. Four pairs of brushless coaxial motors 4 are connected to the central body 1 through support arms 2, four sets of propellers 3 are respectively arranged on the four pairs of brushless coaxial motors 4, four sets of support arms 2 are evenly distributed around the central body 1, and are located same plane.
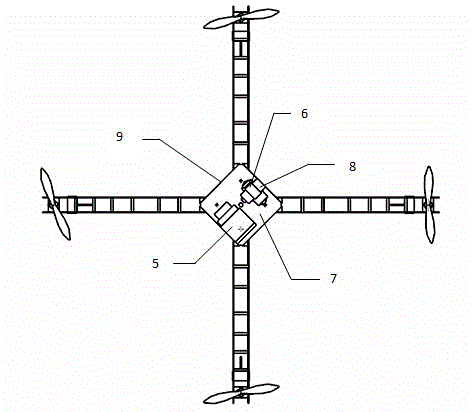
[0035] In this embodiment, the central body is divided into three layers of space in the order from top to bottom, wherei...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More