Quaternion Kalman filtering attitude estimation method based on geomagnetic gradient tensor
A Kalman filter, gradient tensor technology, applied in the direction of navigation, measurement devices, ground navigation, etc. through velocity/acceleration measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be further described below in conjunction with accompanying drawing:
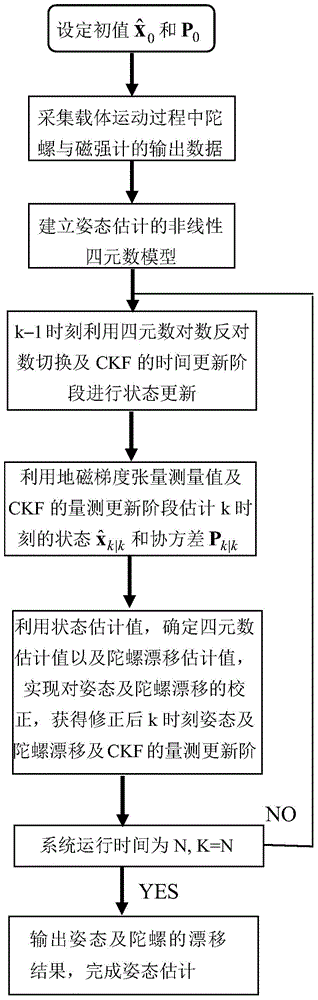
[0074] figure 1 A specific flow chart of the present invention is given. The specific embodiment of the present invention is described in detail below in conjunction with accompanying drawing:
[0075] Assuming that both process noise and observation noise are additive, the discrete nonlinear system in state space form is
[0076] x k =f(x k-1 )+w k-1 (1)
[0077] the y k =h(x k )+v k (2)
[0078] where x k ∈ R n and y k ∈ R m are state vector and measurement vector respectively; f( ) and h( ) are system nonlinear state equation and measurement equation; process noise w k and measurement noise v k is uncorrelated Gaussian white noise, and the mean and covariance matrix are:
[0079] E [ w k ] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More