

Pilotless automobile lateral control method based on turning curvature estimation
A lateral control, unmanned vehicle technology, applied in two-dimensional position/channel control and other directions, can solve the problems such as the control volume is not smooth enough, the lateral error of the preview point has a large influence, and the steering wheel angle is abruptly changed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The preferred mode of the present invention will be described in further detail below in conjunction with the accompanying drawings.
[0042] The vehicle used in this embodiment is the "Tiggo" car of Wuhu Chery, China, and it is equipped with the GPS-INS combined positioning system of NovAtel's SPAN-CPT and the model of Zhongke Automation It is an autopilot of IPD1 and a microcomputer as an industrial computer. Among them, the GPS-INS combined positioning system is used to obtain the latitude and longitude, vehicle speed signal, and vehicle heading angle signal of the vehicle's location to send to the industrial computer; when the system uses differential positioning, it provides a positioning accuracy of 0.1m . The autopilot is connected to the industrial computer through the CAN bus, and is used to receive the vehicle speed control signal and the steering wheel angle command signal from the industrial computer.
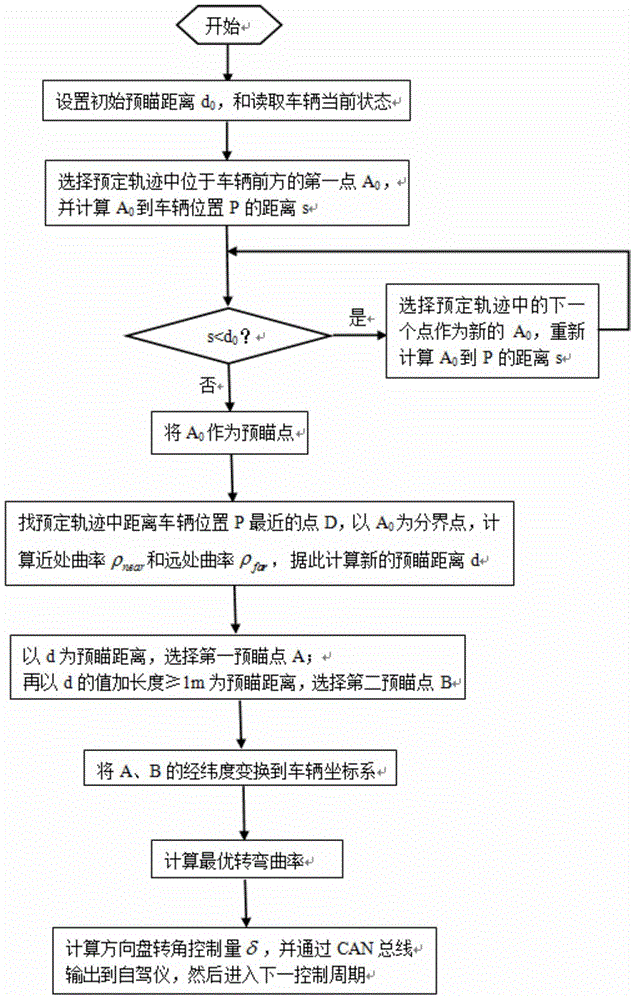
[0043] See figure 1 , The workflow of the unmanned vehicl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More