

Unmanned helicopter flying control platform system based on QNX
An unmanned helicopter and flight control technology, applied in attitude control, three-dimensional position/course control, etc., can solve the problems of attitude subsystem and navigation subsystem, so as to ensure safety and stability, improve robustness, The effect of improving the management structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
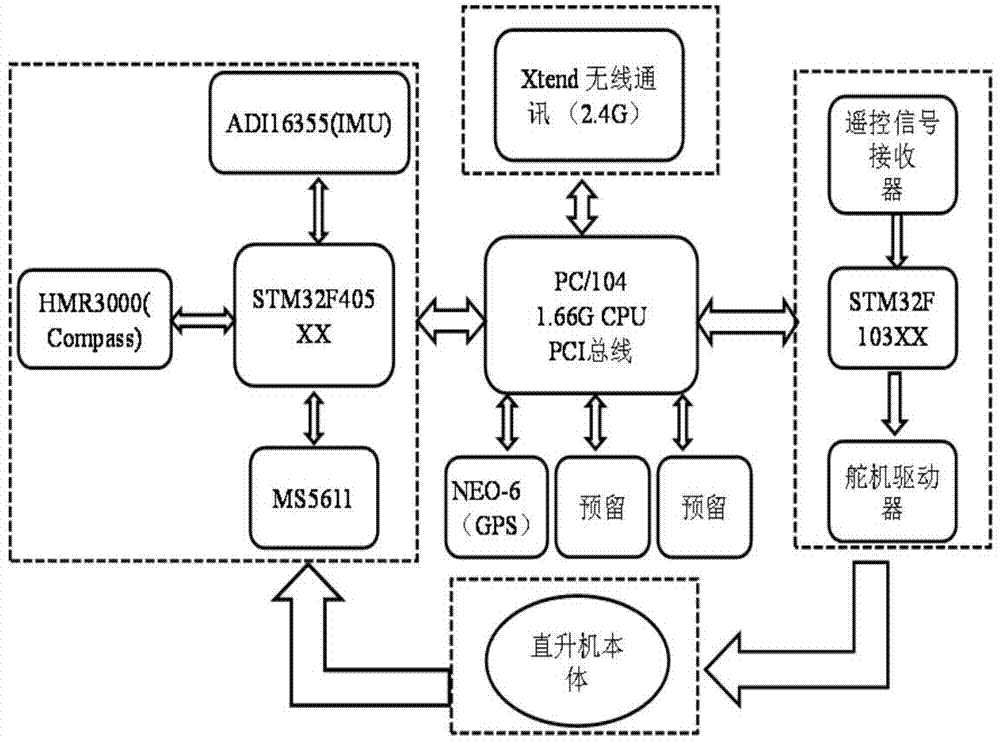
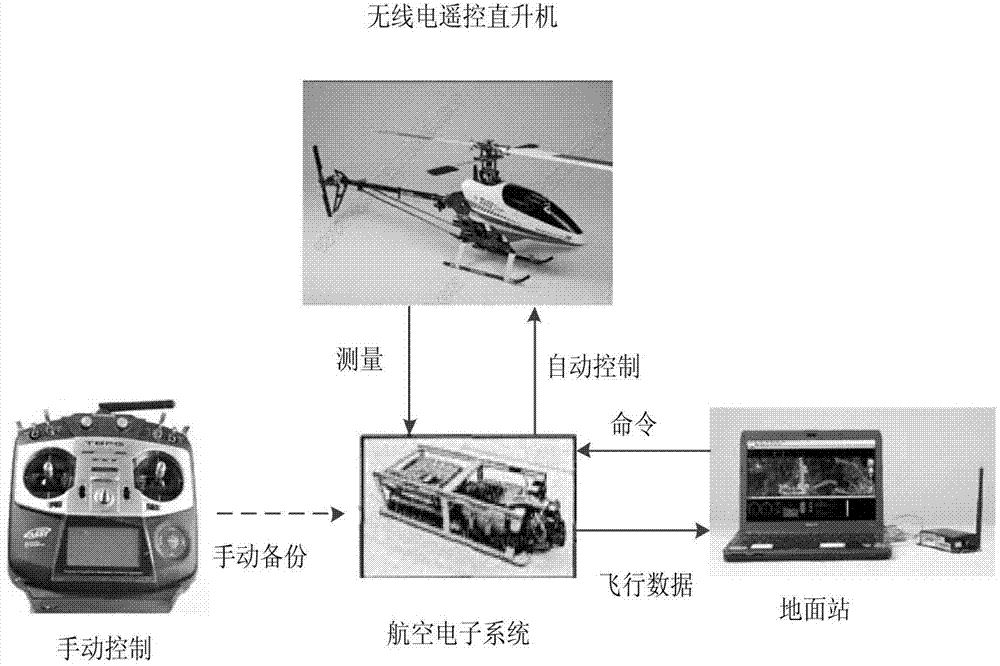
[0025] The invention provides a complete QNX-based unmanned helicopter control platform, and develops a set of INS / GPS integrated navigation system based on EKF (extended Kalman filter) algorithm for the unmanned helicopter control system. The INS / GPS integrated navigation system uses the EKF algorithm to convert the attitude data (including three-axis gyroscope data, three-axis accelerometer data, three-axis electronic compass data, and barometer data) measured by the INS (inertial navigation system) to the GPS navigation system. The obtained satellite data are fused to obtain more accurate positi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More