

Mobile robot navigation method based on one point RANSAC and FAST algorithm
A technology of mobile robot and navigation method, which is applied in the field of positioning and navigation of mobile robot based on image matching, and can solve the problems of reducing the calculation speed of the algorithm and increasing the number of iterations of the algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
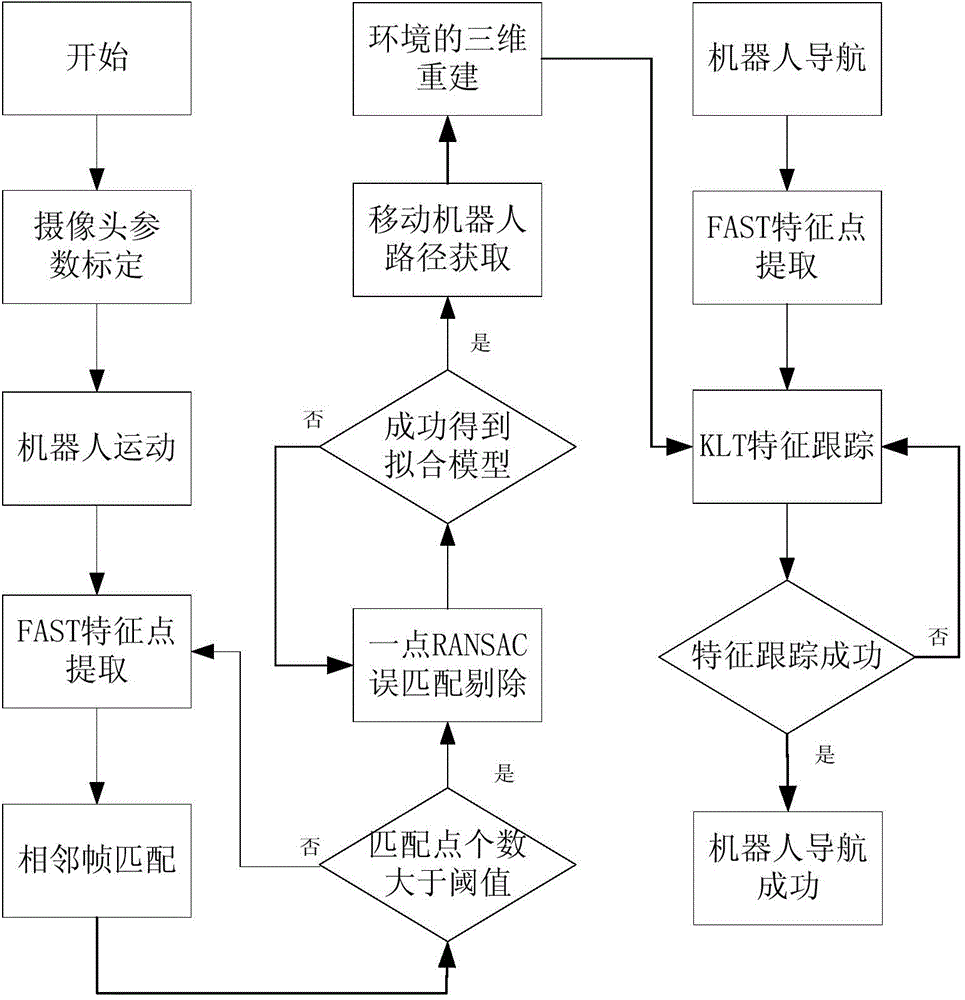
[0022] figure 1Shown is a mobile robot navigation method flow chart based on a little RANSAC and FAST algorithm, and its specific content is as follows:
[0023] (1) Start the mobile robot control system and perform camera parameter calibration.
[0024] (2) The mobile robot explores and travels in the environment driven by the servo driver and the servo motor, and the camera continuously collects environmental image information.
[0025] (3) Extract feature points from the collected video frames. If you use the following methods to extract:
[0026] Roughly match feature points with the same name in two adjacent video frames. Extract the natural feature points of the key frame and intercept the feature fragments, select the stable point set through affine transformation, and each stable point fragment in the stable point set is obtained through affine transformation to obtain the training fragment; randomly generate random fern clusters and their judgment nodes Attribute ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More