

Movement classification-based pedestrian self-positioning method
A motion classification and autonomous positioning technology, applied in the field of navigation and positioning, can solve problems such as failure and inability to recognize gait changes of different people, and achieve the effect of improving accuracy and precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
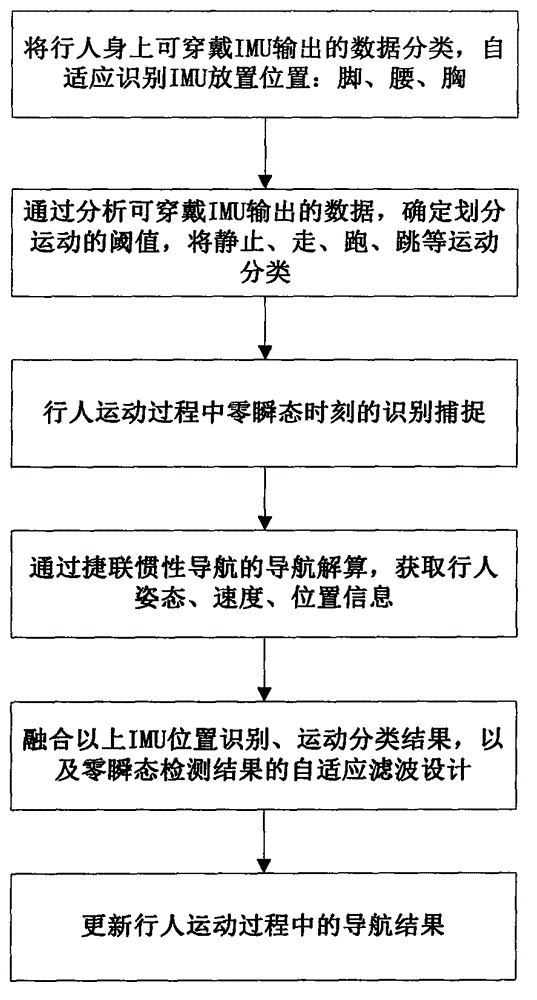
[0020] The flow of a pedestrian autonomous positioning method based on motion classification provided by the present invention is as follows: figure 1 As shown, the details are as follows:
[0021] Step 1, classify the data output by the wearable IMU on the pedestrian, and adaptively identify the placement position of the IMU: feet, waist, chest;
[0022] The IMU is placed in different positions such as the feet, waist, chest, etc. The specific force value output by the accelerometer and the angular velocity output by the gyroscope are different. By analyzing the data, the collected data can be adaptively classified and made for subsequent data processing. Prepare.
[0023] Step 2, by analyzing the data output by the wearable IMU, determine the threshold for classifying sports, and classify motions such as stationary, walking, and running;
[0024] Define the composite magnitude of the acceleration as:
[0025] | a k ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More