

Improved particle swarm algorithm based inverse kinematics calculation method for permanent magnetic spherical motor
A technology for improving particle swarms and inverse kinematics, applied in computing, electrical digital data processing, special data processing applications, etc., and can solve problems such as premature convergence of local optimum, complex solution process, and poor robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0043]The permanent magnet spherical motor can greatly increase the magnetic energy product of the motor, effectively improve the operating efficiency of the motor, reduce the volume of the motor, and improve the controllability of the motor. It has a wide range of applications in fields such as robots and intelligent flexible manufacturing systems that require three-dimensional space. . The inverse kinematics of permanent magnet spherical motor, as the basis of dynamic control, motion analysis, off-line programming and trajectory planning, has become an urgent problem to be solved.
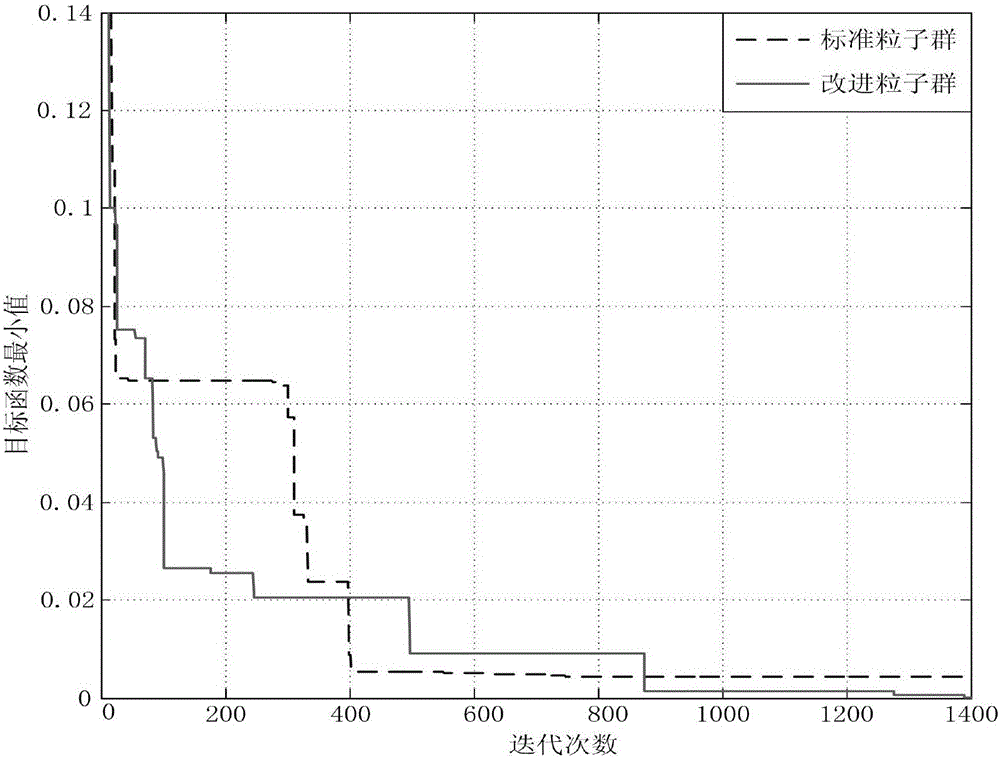
[0044] The solution method of inverse kinematics is divided into analytical method and intelligent algorithm. The former is a set of very complex nonlinear equations about generalized Euler angles, the calculation is more complicated and the solution is more difficult. In the intelligent algorithm, in view of the complex, difficult, poor robustness of the neural network and the insufficient preci...
Embodiment 2
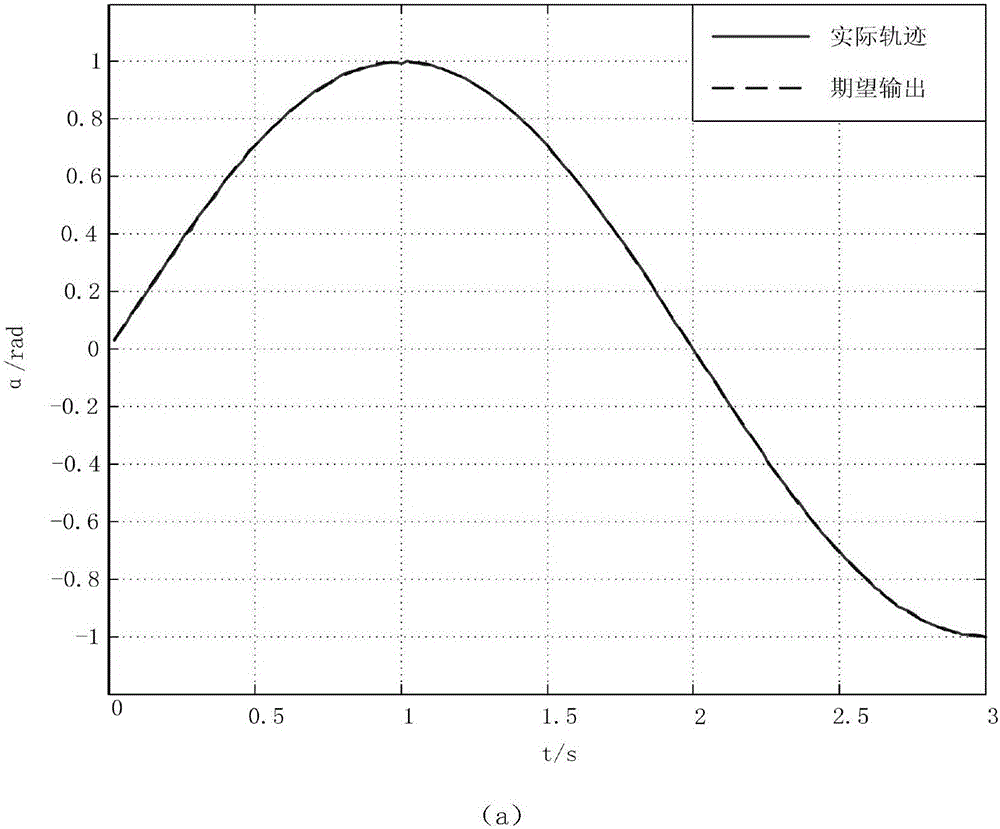
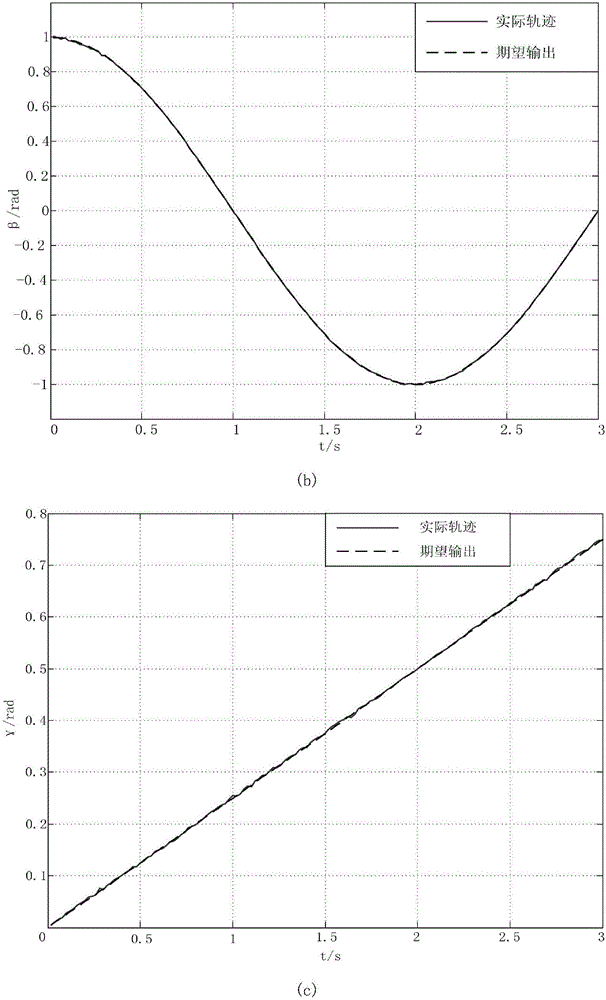
[0096] In order not to lose generality, when the initial value of the Euler angle is not zero, the rotor output shaft moves on a complex trajectory. In the simulation, the initial coordinates of the position point of the rotor output shaft are (x i ,y i ,z i )=(0,0.6,0.8), the given Euler angle is defined in Cartesian space as:
[0097] α(n+1)=2*sin(1.5*(t n +0.02))
[0098] β(n+1)=sin(pi / 2*(t n +0.02)-pi / 6)+cos(1.5*pi*(t n +0.02))t 0 =0,t 150 =3
[0099] γ(n+1)=2*cos(2*(t n +0.02))*sin(0.5*(t n +0.02))
[0100] The improved particle swarm optimization algorithm is used to discretize the solution to the continuous change of Euler angles. Comparing the given Euler angle change trajectory with the Euler angle change obtained by the improved particle swarm algorithm, the comparison results are as follows Figure 4 As shown, among them, Figure 4 (a), (b), and (c) respectively correspond to the comparison of three Euler angles α, β, and γ. Using the obtained Euler an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More