Wrist part two-stage slewing mechanism of small underwater hydraulic manipulator
A technology of hydraulic machinery and slewing mechanism, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of unsuitable small underwater hydraulic manipulators, affecting the flexibility of manipulators, and bulky volume, etc., to achieve light weight, compact structure, and small volume Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention is described in more detail below in conjunction with accompanying drawing example:
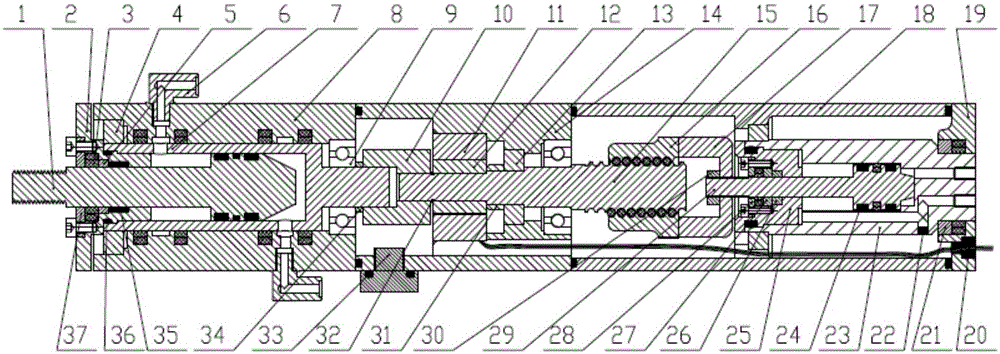
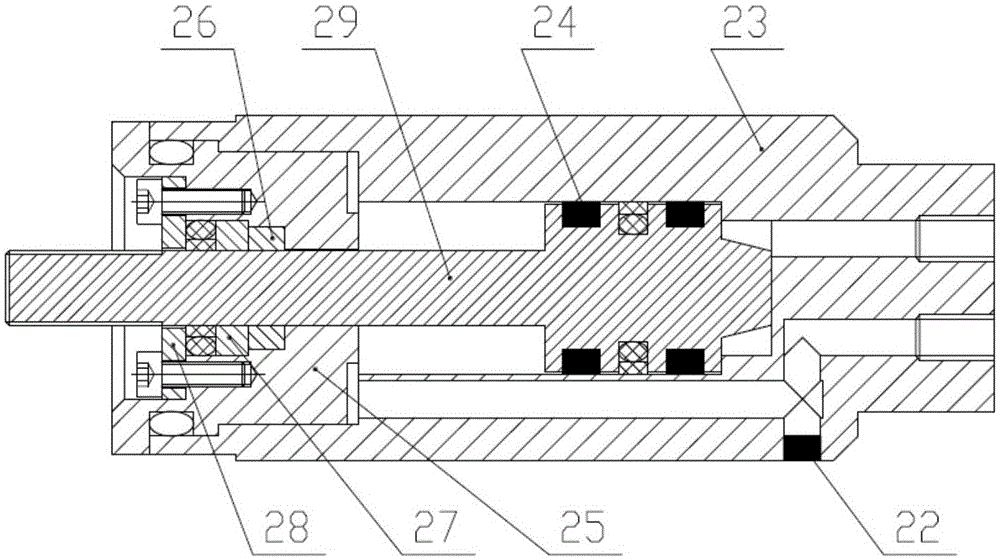
[0026] combine figure 1 ~6, the parts included in the present invention are: output shaft A1, hydraulic cylinder head A2, gray ring 3, sliding bearing A4, copper sleeve A5, connector 6, cylinder barrel A7, front end shell 8, ball bearing A9, coupling Shaft device 10, sensor stator 11, sensor rotor 12, sliding bearing B13, sensor housing 14, output shaft B15, screw nut 16, nut connector 17, rear shell 18, rear end cover 19, signal line 20, sliding bearing C21, welding block 22, drive cylinder 23, rubber guide ring B24, hydraulic cylinder head B25, guide rubber 26, copper sleeve B27, gray ring end cover B28, output shaft C29, nut 30, installation shoulder 31, Circlip 32, plug 33, short shaft shoulder 34, guide ring A35, O-shaped sealing ring 36, gray ring end cap A (37).
[0027] Such as figure 1 As shown, the present invention is mainly composed of a manipulator...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com