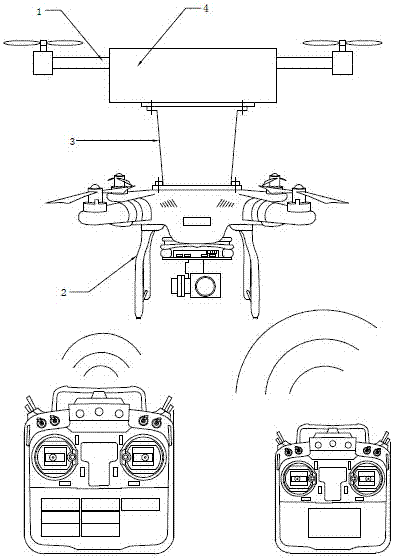
A Dual-UAV Control System with Improved Endurance
A dual UAV and control system technology, applied in the field of aircraft, can solve the problems of inability to realize the load, unmanned aerial vehicle load and flight time cannot be flexibly changed, discontinuous, etc., and achieve continuous and smooth working process, load and flight time. Flexible and changeable, simple and easy control system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0049] The sub-drone can choose the common four-rotor UAV on the market. In the control system of the parent UAV, the main control chip of the CPU motherboard can have multiple choices. In this embodiment, the STM32F10XCXT6 chip is selected as the Main control chip, see Figure 7 .
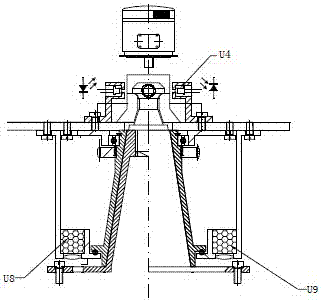
[0050] Docking position LED 1 D1, docking position LED 2 D2, resistor 1 R1, resistor 2 R2 are connected to a PIC16F1824 single-chip microcomputer to form a fiber optic docking successful sensor module. The PIC16F1824 single-chip microcomputer is connected to the STM32F10XCXT6 main control chip through the I2C bus;
[0051] A brushed DC motor full-bridge driver DRV8701, a FET driver H-Driver, potentiometer position sensor S1, resistor three R3 are combined into a docking / release linear driver motor control module, brushed DC motor full-bridge driver DRV8701, potentiometer position sensor S1 is connected to the above-mentioned PIC16F1824 microcontroller, and a FET driver H-Driver is connected to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com