

Gesture collection device for manipulating industrial robot and corresponding gesture collection method
An industrial robot and collection device technology, applied in the field of gesture collection, can solve the problems of poor accuracy, unable to obtain depth of field data, unable to output pictures, etc., to achieve the effect of increasing working space and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below with reference to the accompanying drawings. It should be pointed out that these descriptions are exemplary rather than limiting the present invention.
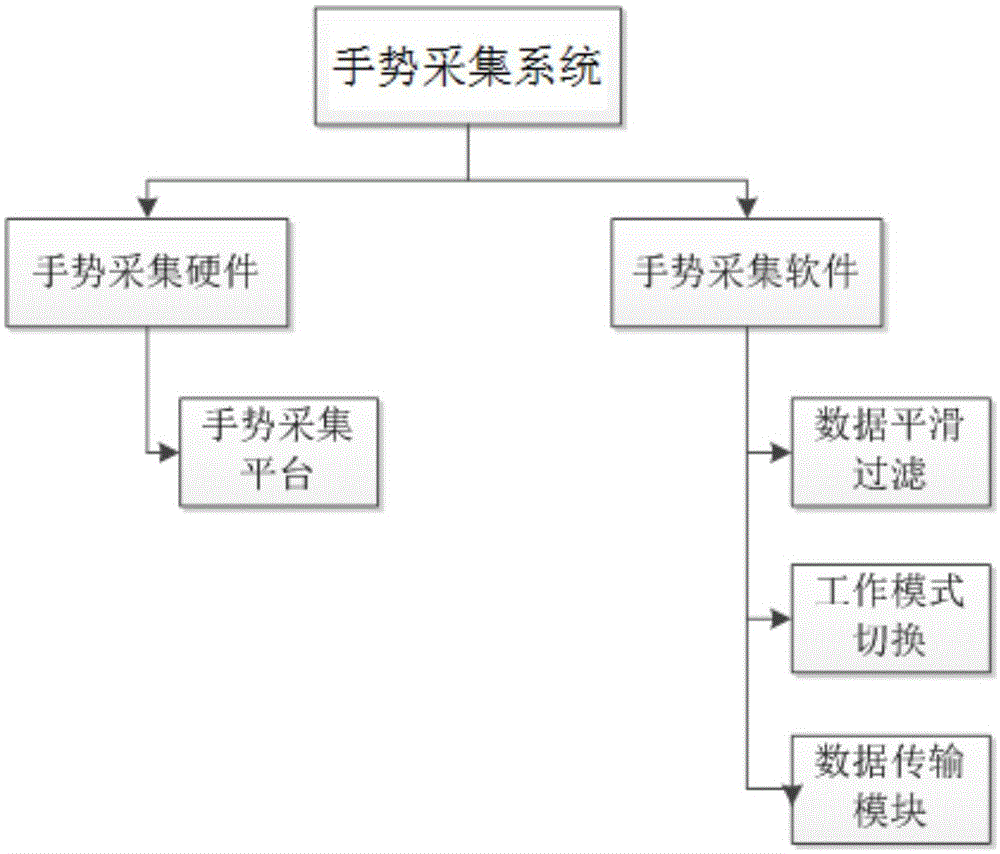
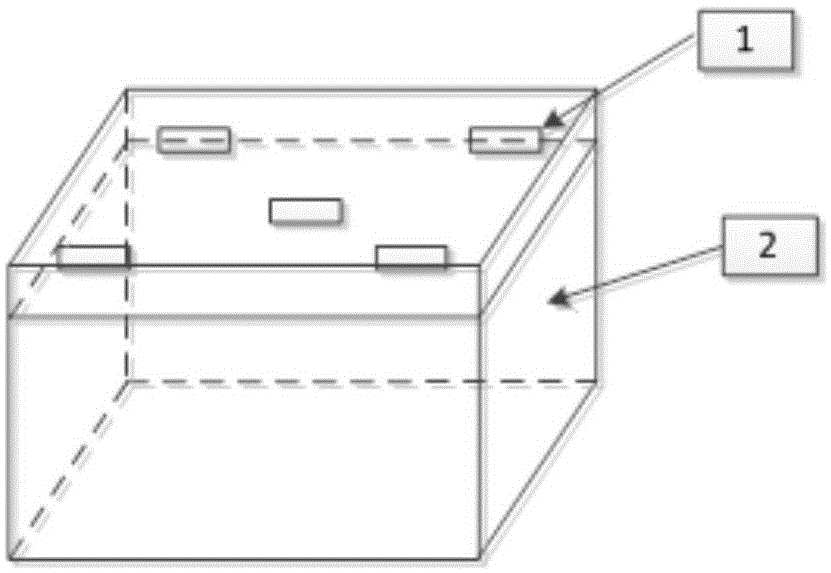
[0051] The whole gesture collection system of the present invention is as follows: figure 1 As shown, it mainly includes hardware and software parts. The gesture acquisition hardware part includes the acquisition platform, which uses the gesture acquisition strategy integrated in it to capture, track, and recognize the human hand pose data. The software part mainly includes a data optimization module. Starting from data security and considering the natural characteristics of human hands, the data processing part provides data filtering conditions and smoothing algorithms, aiming to improve stability while ensuring data security. It should be understood that the gesture acquisition strategy can be implemented as firmware or as software.
[0052] The gesture input...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More