

Inverse compensation stable-attitude quadrotor unmanned aerial vehicle
A quad-rotor UAV and reverse compensation technology, applied in the field of UAV, can solve the problems of non-appearance, complex gimbal structure, and great influence on the quality of aerial photography.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
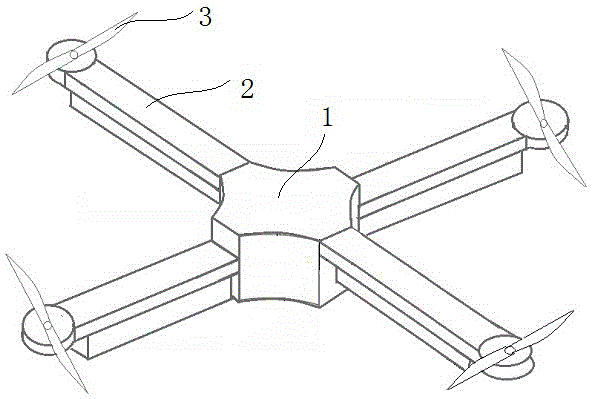
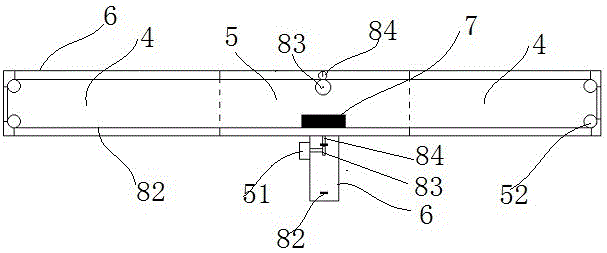
[0027] like figure 1 As shown, a reverse-compensated attitude-stabilized quadrotor UAV comprises a fuselage 1, on which four arms 2 are fixedly connected, and a rotor 3 is installed at the end of the arms 2, and the arms 2 The two opposite and opposite arms are in a straight line, and the connection position of the two opposite arms and the fuselage 1 is higher than the connection position of the other two opposite arms and the fuselage 1. There is a cavity channel 4, and the cavity channel 4 of the opposite arm is communicated through a pipeline 5 arranged in the fuselage 1 to form a parallel channel 6, and a balance block 7 is arranged in the parallel channel 6, which is arranged in the fuselage 1. Driven by the drive on the parallel channel 6 .
[0028] Specifically, as figure 2 As shown, the drive device includes a motor and a transmission chain 82, the pipe 5 is provided with a motor installation position 51, the motor is arranged on the motor installation position 51,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More