

Reconfigurable mechanical arm decentralized control system and control method adopting position measuring
A distributed control system and robotic arm technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult to guarantee the stability and reliability of the controller, large computing resources, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be described in further detail below in conjunction with the accompanying drawings.
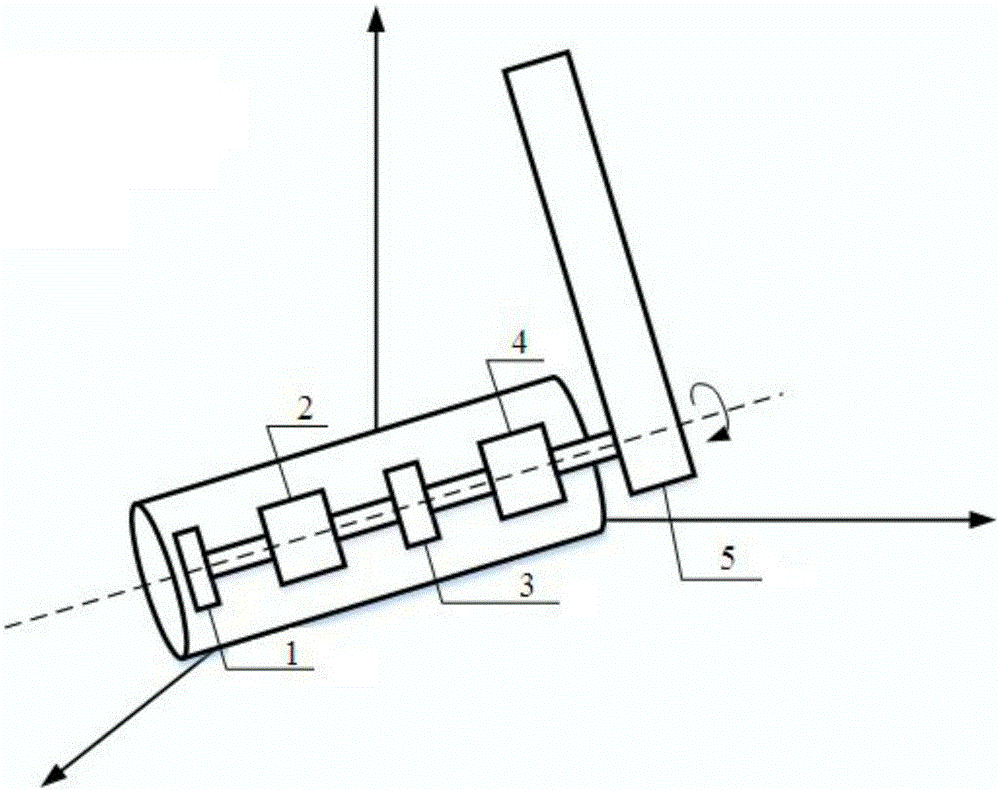
[0051] Such as figure 1 As shown, the distributed control system of the reconfigurable manipulator of the present invention includes an incremental encoder 1, a DC motor 2, a harmonic reducer 3, a rigid coupling element 4 and a connecting rod 5; wherein, the resolution is 4096count The incremental encoder 1 of / rev is installed at the front end of the DC motor 2 to measure the position variable of the DC motor 2; the 48V DC motor 2 is used as the drive device of the system, and the DC motor 2 is connected to the harmonic reducer 3; a typical The harmonic reducer 3 is used as the reduction device of the system to realize the functions of deceleration and torque amplification. Because the harmonic reducer has the advantages of high reduction ratio, small size, light weight, and coaxial assembly, the harmonic reducer is used as the The deceleration device can m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More