

Control system for transformer substation patrol robot
A technology of inspection robot and control system, which is applied in two-dimensional position/channel control, instruments, measuring electronics, etc., can solve the problems of difficult inspection work, difficult quality assurance, low work efficiency, etc., and is conducive to popularization and use , Reduce system cost, good control performance and expansion performance effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with drawings and embodiments.
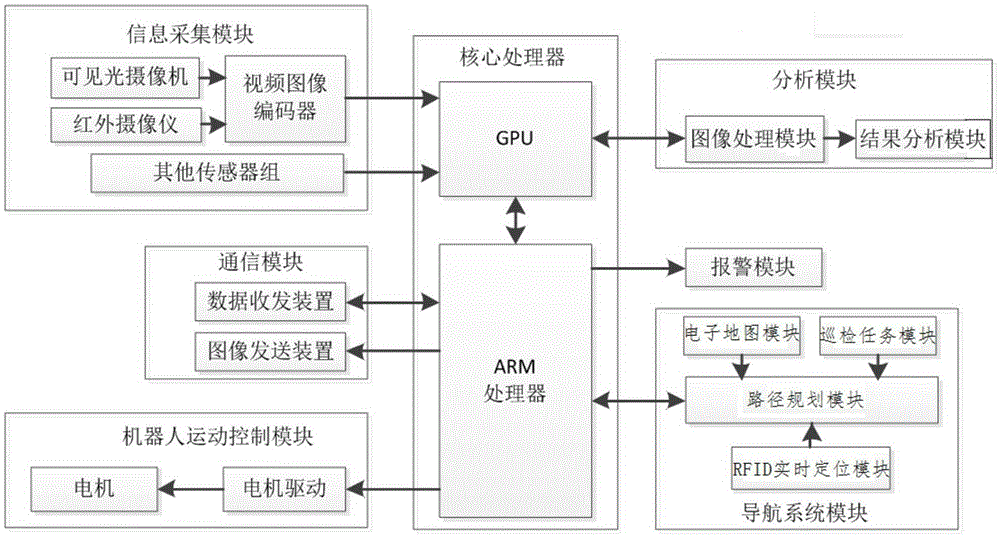
[0041] The control system of a substation inspection robot of the present invention is characterized in that it includes a core processor, an information collection module, a communication module, a robot motion control module, an analysis module and a navigation system module;
[0042] Such as Figure 1~3 As shown, the core processor includes a GPU and an ARM processor, and the GPU is connected to the ARM processing in a bidirectional data connection; the GPU is connected to the ARM processing in a bidirectional data connection. The GPU receives the information collected by the information acquisition module and the encoded video image information, and comprehensively processes these information, and converts the processed results into corresponding operation instructions and sends them to the ARM processor. The ARM processor receives the transmission data of the uppe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More