

Abrasive belt grinding device and processing method for controllable pitch propeller profile based on industrial robot
An industrial robot, abrasive belt grinding technology, applied in abrasive belt grinders, metal processing equipment, grinding/polishing equipment, etc. At the bottom, it is difficult to ensure the processing quality and other problems, so as to shorten the auxiliary time, eliminate occupational hazards, and improve the stability of grinding accuracy and processing quality.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the drawings. The embodiments of the present invention include but are not limited to the following examples.
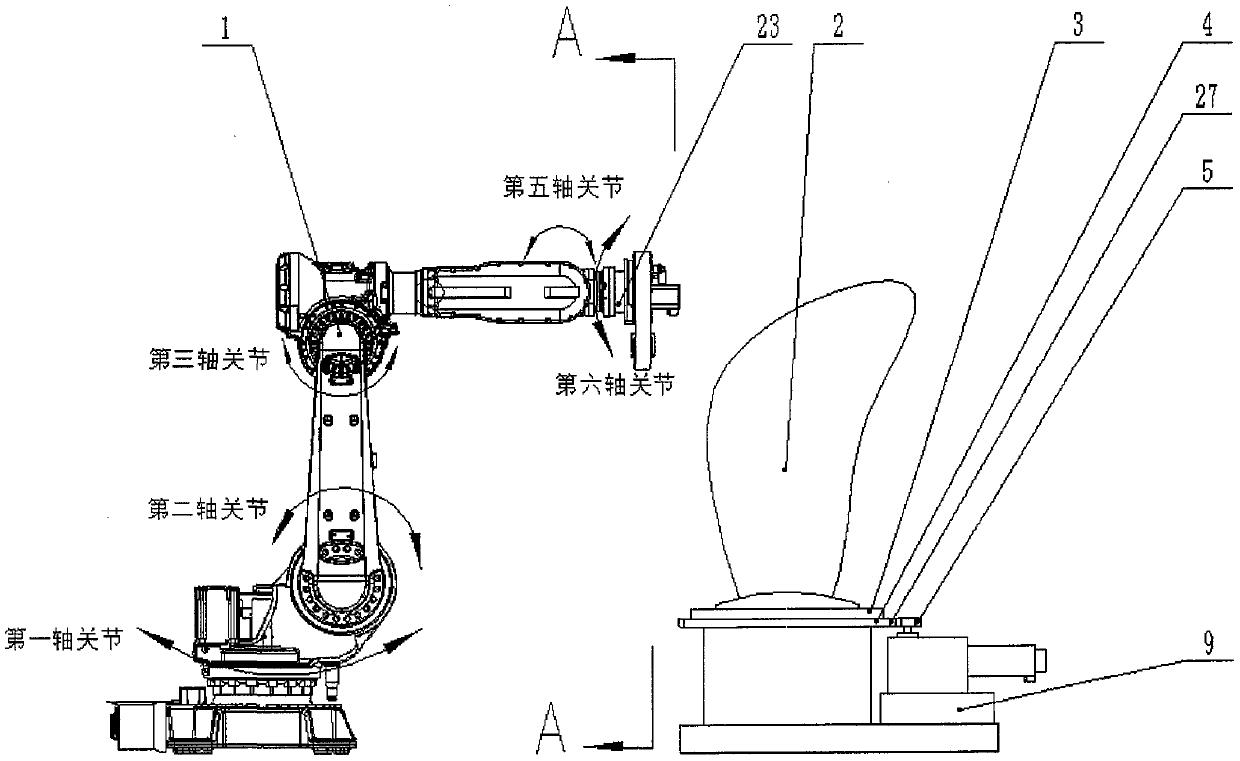
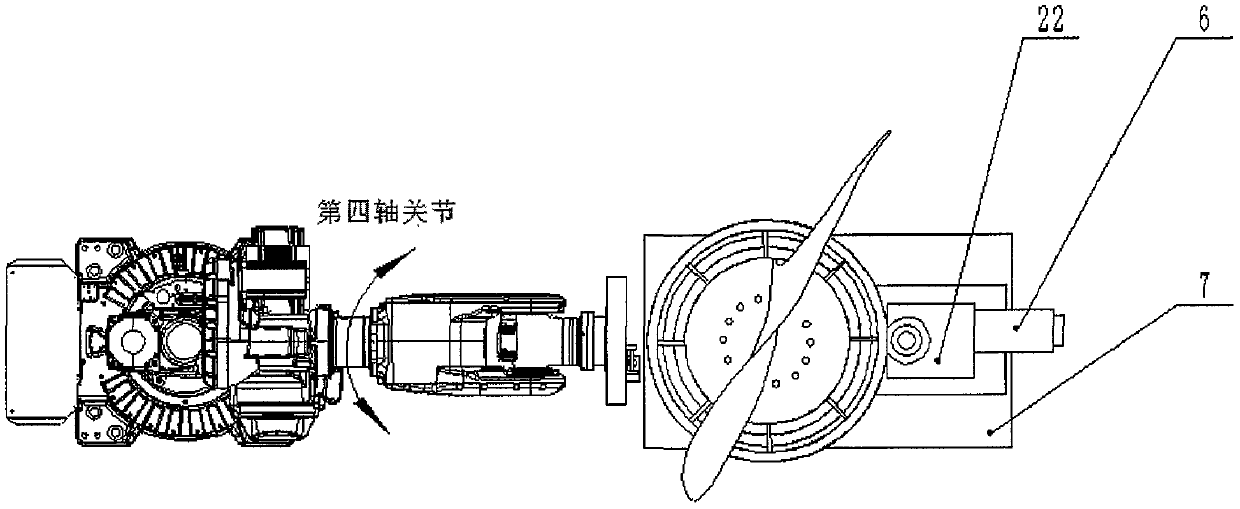
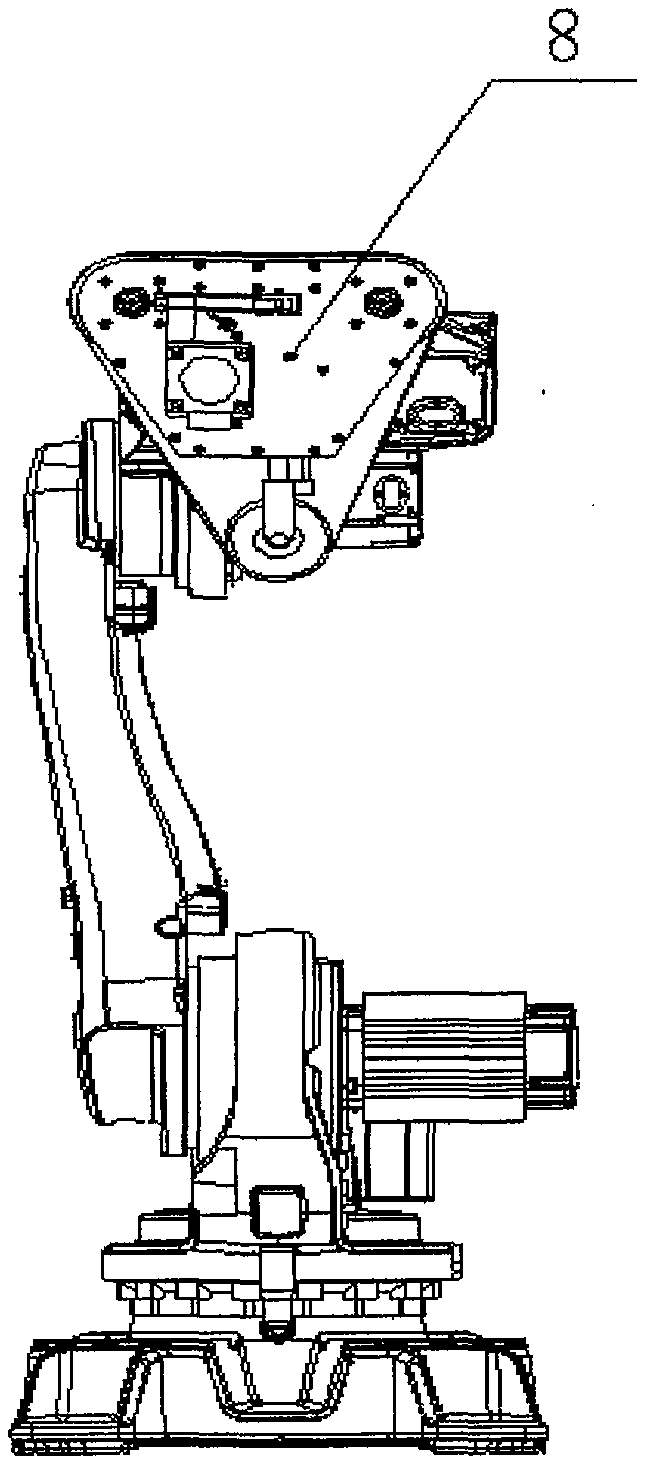
[0035] Such as figure 1 , figure 2 , image 3 Shown are the front, side, and A-A views of a preferred example of the belt grinding device for the controllable pitch propeller profile based on the industrial robot of the present invention. It mainly includes a six-degree-of-freedom joint industrial robot 1 installed on the ground through multi-joint joint motion synthesis for controlling the different trajectories of the belt grinding mechanism device 8. It is set in the working space of the industrial robot and driven by a servo motor 6 to reduce the speed. The box 22 drives the gear to engage and drive the ring gear 27 to realize the 360°rotation of the CNC-driven rotary table 3, which is installed and fixed on the CNC rotary table to be processed, the blank part 2 of the marine controlla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More