

Working ROV training simulator motion control simulation system
A motion control and simulation system technology, applied in general control systems, control/regulation systems, simulators, etc., can solve problems such as control command execution lag, large nonlinear coupling characteristics, submarine flow field interference with long umbilical cables, etc., to achieve The effect of clear hierarchy, simple structure and convenient use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] The present invention will be described in further detail below in conjunction with the accompanying drawings.
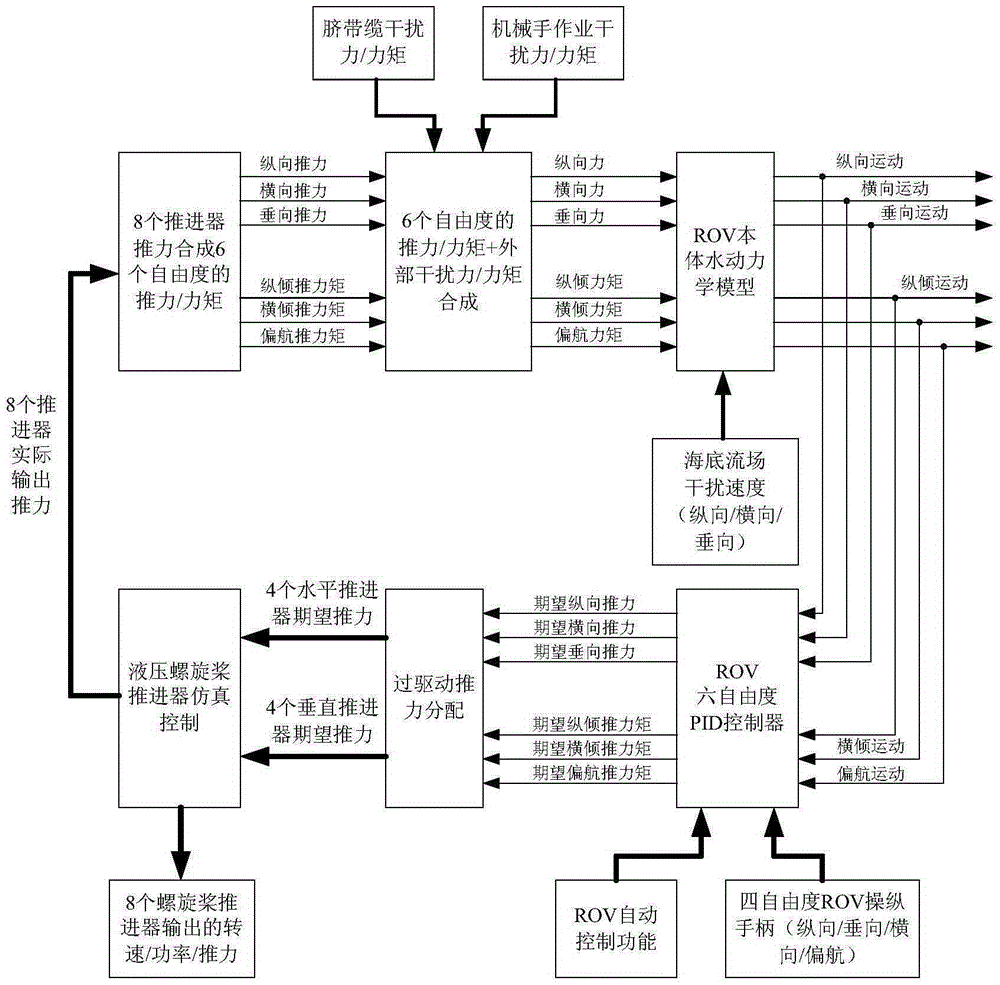
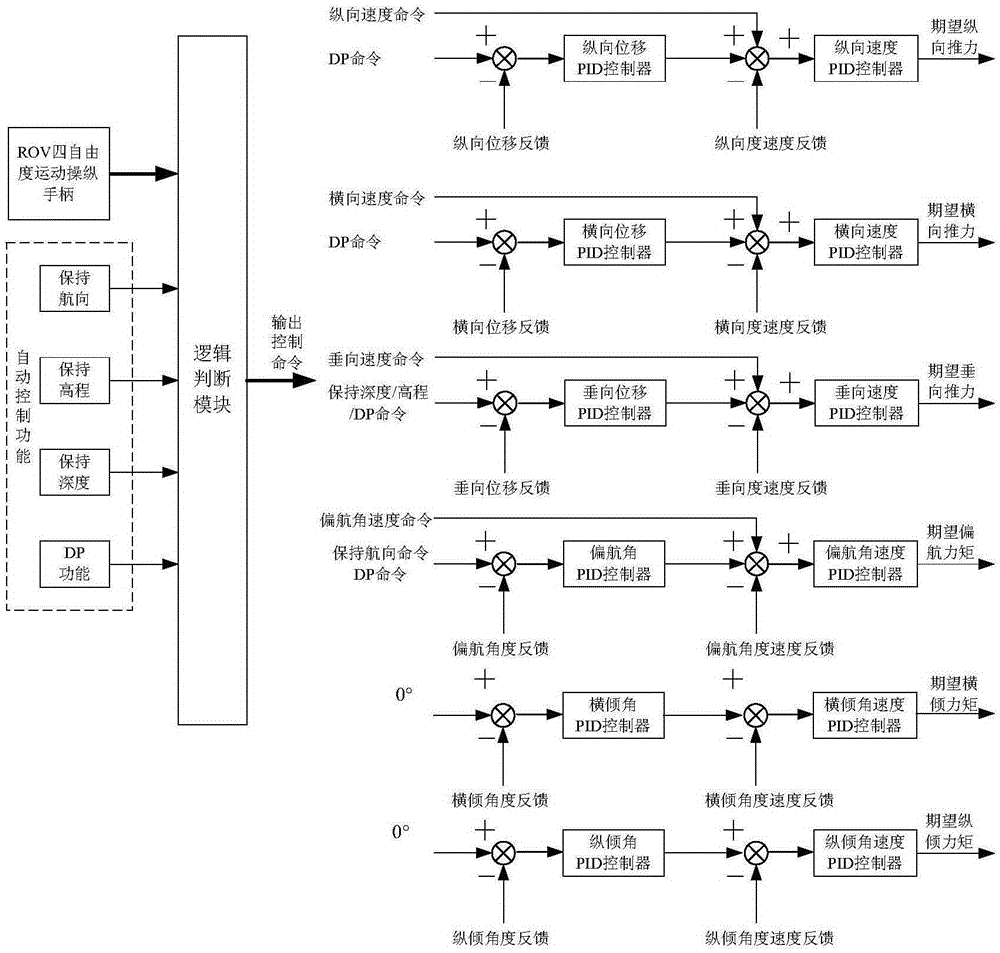
[0023] The purpose of the present invention is to provide a motion control system applicable to an operational ROV simulation training simulator. The invention includes: ROV body hydrodynamic system model, submarine flow field interference velocity model, manipulator operation interference force / moment model, umbilical cable interference force / torque model, ROV six-degree-of-freedom PID controller module, overdrive thrust distribution module, Hydraulic propeller thruster simulation control module, 8 thruster thrust synthesis 6-degree-of-freedom thrust / torque module, 6-degree-of-freedom thrust / torque and external disturbance force / torque synthesis module, ROV automatic control function module and four degrees of freedom ROV joystick module. The present invention can simulate the conditions of different seabed flow field speeds and manipulator operation interf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More