

Orthopaedic surgery robot based on non-invasive type real-time surgery positioning navigation device
Orthopedic surgery, positioning and navigation technology, applied in surgical robots, stereotaxic surgical instruments, surgery, etc., can solve the problems of increasing radiation exposure of patients, increasing operation time, affecting operation accuracy, etc., to reduce posture adjustment time and shorten capture stroke , the effect of high operational flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Below in conjunction with accompanying drawing, the present invention will be further described:
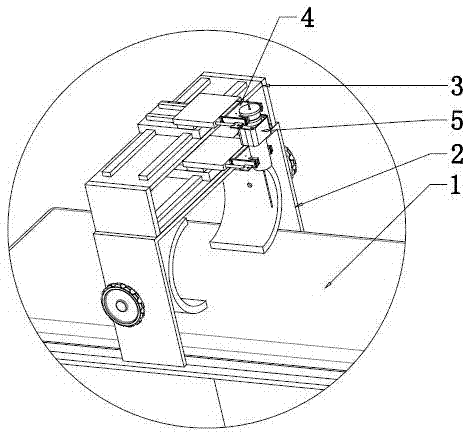
[0033] Such as figure 1 As shown, the present invention is composed of an operating bed 1, a fixing device 2, an actuator 3, a mechanical arm 4 and a manipulator 5; The inner card is connected to set the manipulator.
[0034] The operating bed 1 is connected with the fixing device 2 through a track, and the track has a locking device, which can be locked at any position of the track. Other functions of the operating bed are realized by prior art.
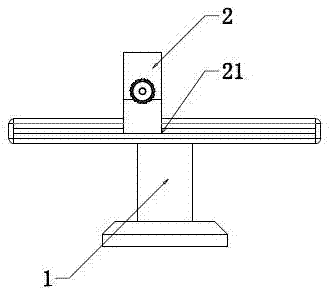
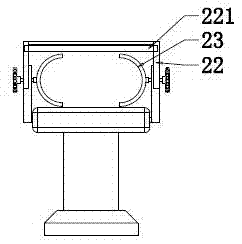
[0035] The fixing device 2 includes a horizontal movement mechanism 21 , a vertical movement mechanism 22 and a limb clamping device 23 . Wherein the horizontal movement mechanism 21 is connected with the operating bed 1 through the track pair, and is used for the rapid movement and preliminary positioning of the robot in the horizontal direction. The vertical movement mechanism 22 controls the lifting through the helical pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More