

Control system and method of intelligent wheelchair
A technology of control system and control method, which is applied in vehicle rescue, patient chairs or special transportation tools, medical transportation, etc., can solve the problems of rehabilitation wheelchairs that are difficult to coordinate and cannot realize human-computer interaction well, and achieve Strong applicability, reduced complexity, and cost-effective effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
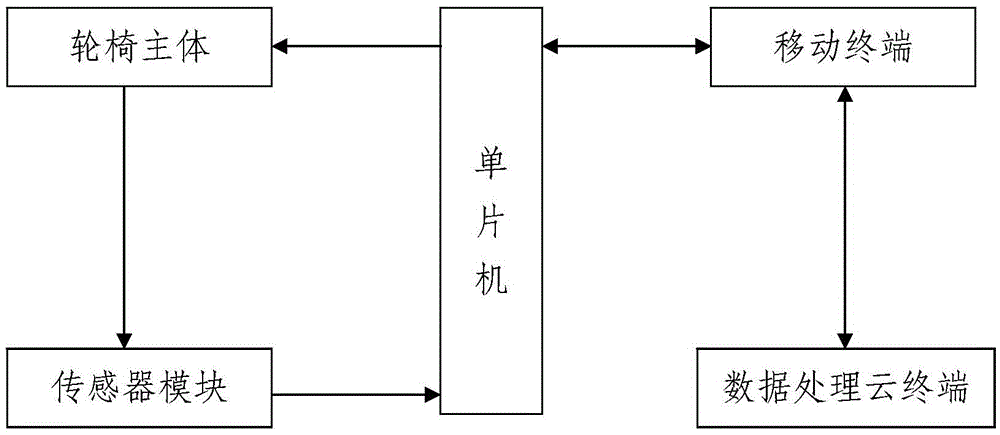
[0060] combine figure 1 The human-computer interaction control subsystem of the intelligent wheelchair control system of the present invention is described.
[0061] like figure 1 As shown, the human-computer interaction control subsystem of the intelligent wheelchair control system of the present invention includes a sensor module, a single-chip microcomputer, a mobile terminal and a data processing cloud terminal. The sensor module is used to collect training data of the user. The voltage signals collected by each sensor are amplified by the amplifier circuit and then transmitted to the A / D conversion module, and then input into the single chip microcomputer. The single-chip microcomputer sends the training data collected by the sensor to the mobile terminal, and the mobile terminal sends the collected training data to the data processing cloud terminal through the wireless network. The data processing cloud terminal performs data processing on the received training data....
Embodiment 2
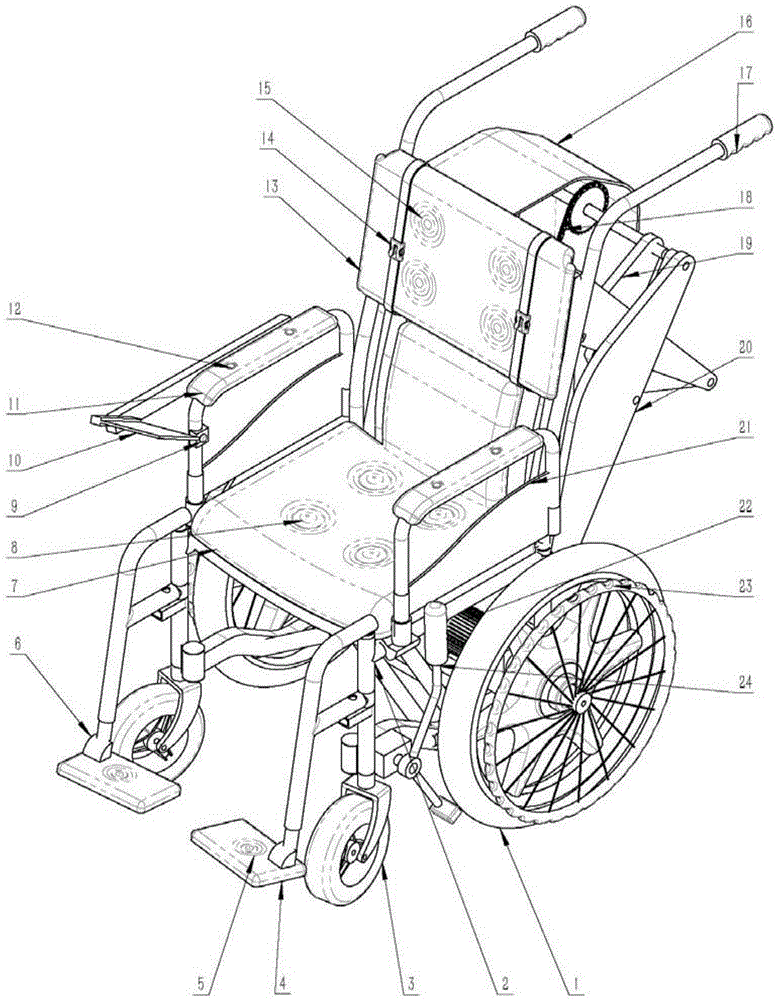
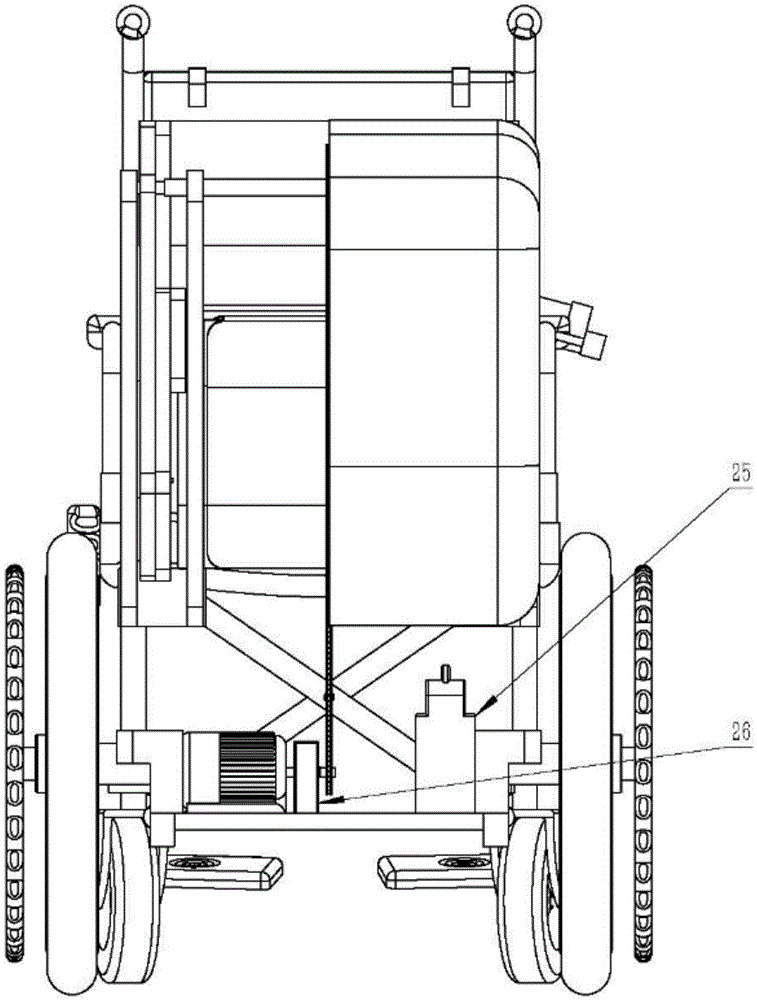
[0064] combine figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 and Figure 7 The wheelchair motion control subsystem of the intelligent wheelchair control system of the present invention is described.
[0065] The wheelchair motion control subsystem of the intelligent wheelchair control system of the present invention at least includes a wheelchair main body. like figure 2 and image 3 As shown, the wheelchair main body includes the following structures: driving wheel 1, vehicle frame 2, driven wheel 3, pedal 4, elastic connector 6, seat cushion 7, clutch button 9, terminal support frame 10, armrest 11, backrest 13, card Buckle 14, protective shell 16, handle 17, transmission chain 18, driving rod 19, support frame 20, baffle plate 21, servo motor 22, manual wheel 23, handbrake 24, battery 25 and clutch 26.
[0066] When the user uses the wheelchair main body of the present invention to assist in completing the sit-up training, the user needs to fix himself on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More