Robot hand with three under-actuated fingers connected in parallel
An underactuated and finger-based technology, applied in the field of robotics, can solve the problems of low stiffness and poor carrying capacity of parallel mechanisms, and achieve the effect of large working space, less degrees of freedom, and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
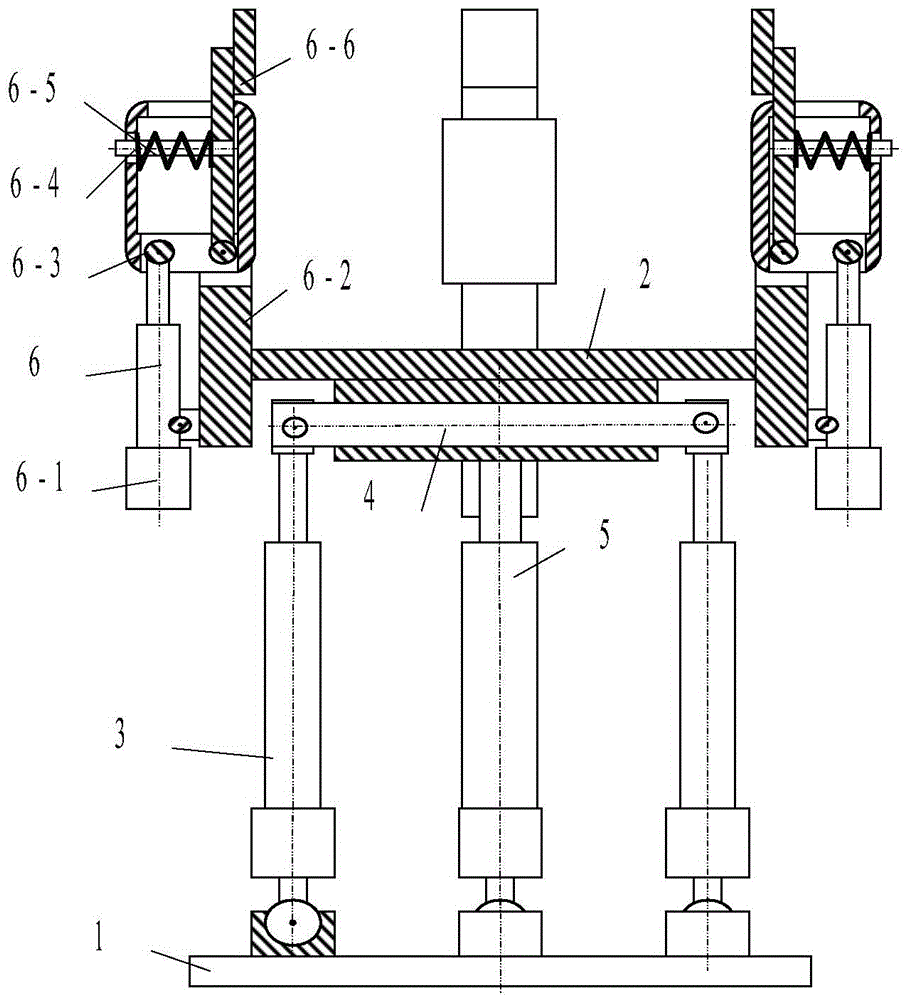
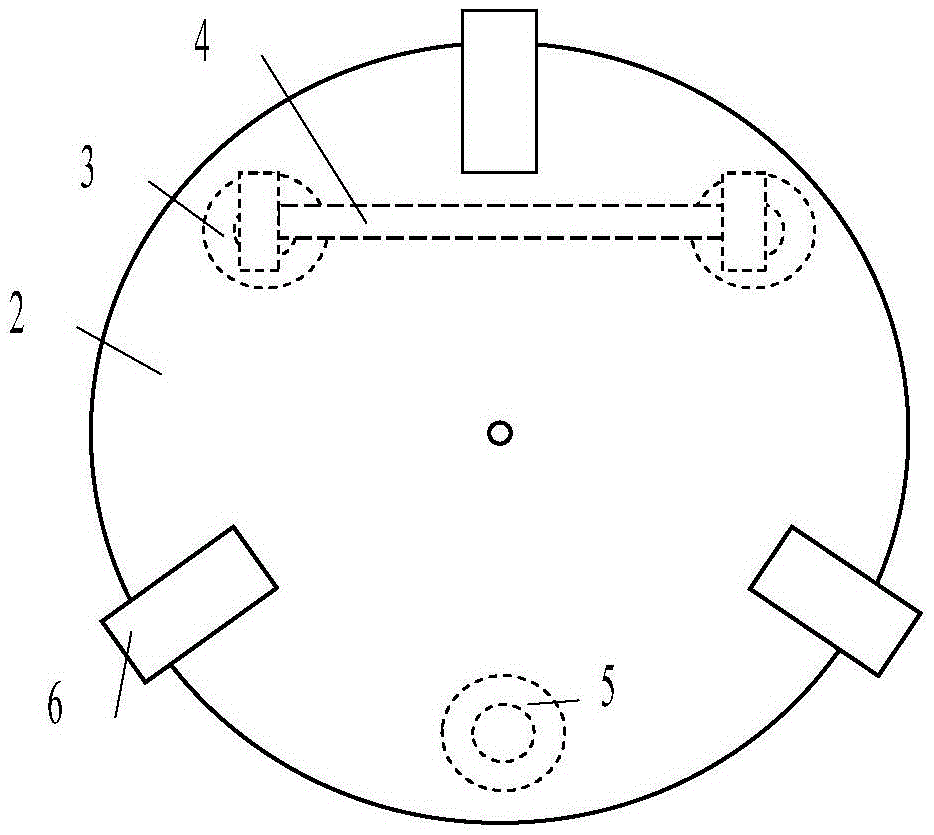
[0013] exist figure 1 and figure 2 In the schematic diagram of the parallel robot hand with three underactuated fingers shown, the three drive branches are all driven by conventional linear telescopic electric cylinders, and the three drive branches and the three underactuated finger mechanisms are formed between the moving platform and the machine base. Alternating circles are evenly distributed. Frame 1 is provided with 3 ball bearings uniformly distributed around the circumference; moving platform 2 is provided with 1 horizontal through hole and 1 vertical through hole; the middle part of connecting rod 4 is rotationally connected with the horizontal through hole of moving platform. The two ends of the connecting rod are respectively provided with through holes perpendicular to the axis of the connecting rod and parallel to each other; the upper end of the SP-type driving branch 5 is fixedly connected with the vertical through-hole of the above-mentioned moving platform, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More