

Vehicle collision avoidance system and track planning method thereof
A trajectory planning, automobile technology, applied in the direction of vehicle components, driver input parameters, external condition input parameters, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
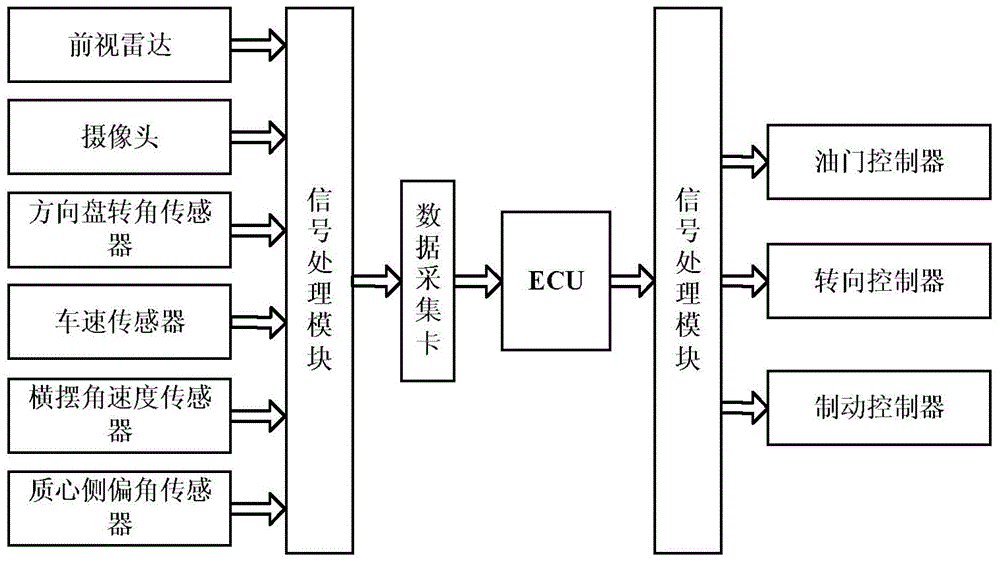
[0045] Such as figure 1As shown, the present invention discloses an active collision avoidance system for automobiles, which includes a forward-looking radar, a camera, a signal processing module, a vehicle speed sensor, a yaw rate sensor, a side slip angle sensor, a steering wheel angle sensor, an electronic control unit ECU, and a gas pedal. controllers, steering controllers and brake controllers;
[0046] The forward-looking radar and the camera are connected to the electronic control power supply ECU through a signal processing module; , the steering controller and the brake controller are connected;
[0047] Both the forward-looking radar and the camera are installed in front of the car to detect the road conditions in front of the car, and the measured signal is processed by the signal processing module and then transmitted to the electroni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More