

Electric turntable position tracking control method based on disturbance upper bound estimation
A tracking control, electric technology, applied in the field of control, can solve the problems of insufficient consideration of system parameter changes, uncertain nonlinear upper bound assumptions, and far-fetched
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
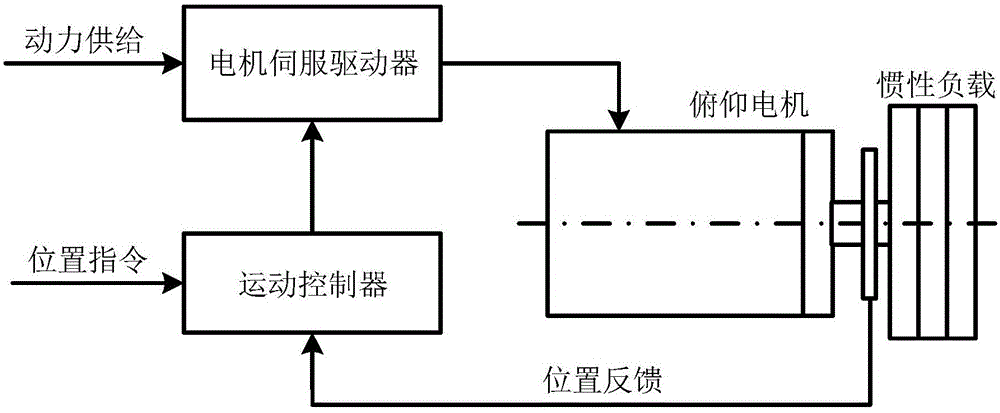
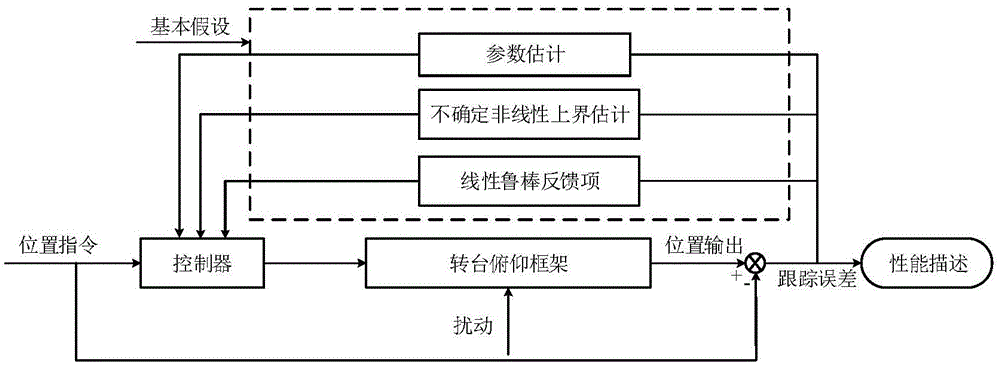
[0035] Specific implementation mode one: combine figure 1 with figure 2 To illustrate this embodiment, the specific steps of a position tracking control method for an electric turntable based on the estimation of the upper bound of the disturbance described in this embodiment are as follows:
[0036] Step 1. Establish a mathematical model of the system:
[0037] The turntable mainly includes three frames of pitch, azimuth and roll. The mathematical models of the three are basically the same. The present invention takes the pitch frame of the turntable as an example for illustration. According to Newton's second law, the dynamic equation of the pitch frame is:
[0038] J y ·· = k u u - B y · - T G + Δ - - - ( ...
Embodiment
[0074] The parameter of the turntable is the inertial load of the pitch frame: J=0.01kg m 2 ;Voltage torque constant: k u =5N·m / V; viscous friction coefficient: B=1.025N·m; gravity moment equivalent: β=2N·m.
[0075] In order to fully verify the effectiveness of the control method of the present invention for the motor servo system, a large number of PID controllers used in engineering practice are selected as a comparison for simulation verification, and its parameters are selected as k p =40,k i =1000,k d = 0.1.
[0076] The controller (recorded as ADC) parameter that the present invention designs is selected as: k 1 =20,k 2 = 4, σ 11 =0.001, σ 12 =0.001, σ 2 =0.001, γ=15, τ=0.2, the adaptive law parameters are selected as Γ 1 =0.2, Γ 2 =10.
[0077] The estimation range of system parameters is selected as: θ min =[0,0] T , θ max =[0.005,0.5] T .
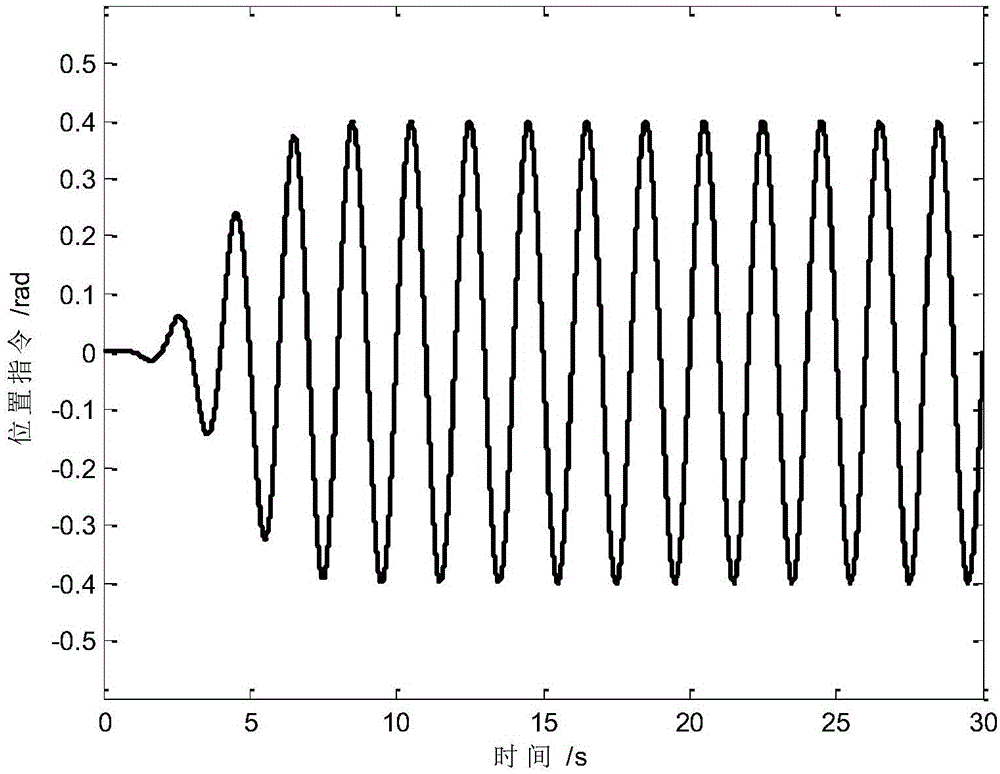
[0078] The system tracking position instruction is selected as x 1d =0.4sin(πt)[1-exp(-0.1t 2 )](like image ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More