

Intelligent mechanical arm with automatic button pressing function
A technology of intelligent machinery and arms, applied in the direction of manipulators, program-controlled manipulators, claw arms, etc., can solve the problems of low commercial value, inability to work continuously, and the inability of the arm to automatically recognize the target object, etc., to achieve easy processing and assembly, simple and clear structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
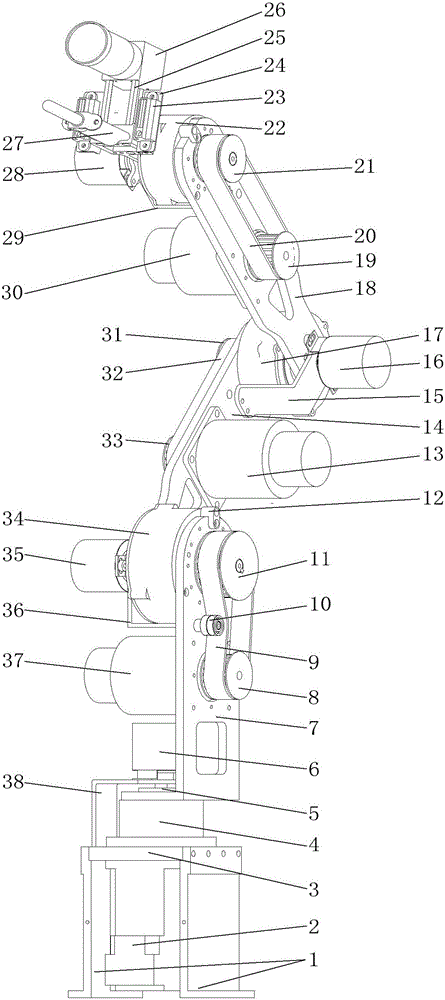
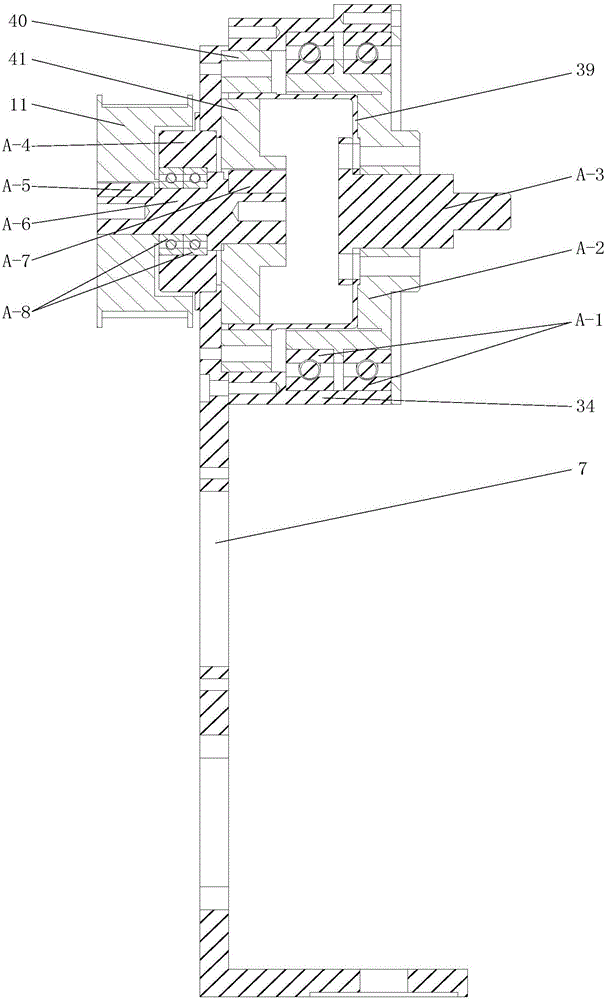
[0038] combine figure 1 and figure 2 , the present invention is an intelligent mechanical arm with the function of automatically pressing buttons, including a bottom servo motor support 1, a bottom servo motor 2, a bottom harmonic reducer support 3, a bottom harmonic reducer 4, and a bottom encoder shaft 5 , Bottom encoder 6, first arm 7, first servo motor synchronous wheel 8, first synchronous belt 9, first tension bearing 10, first harmonic reducer synchronous wheel 11, first auxiliary connector 12, The second servo motor 13, the second arm 14, the second encoder fixed bracket 15, the second encoder 16, the second harmonic reducer bearing seat 17, the third arm 18, the third servo motor synchronous wheel 19, The third synchronous belt 20, the third harmonic reducer synchronous wheel 21, the third harmonic reducer bearing seat 22, the infrared ranging sensor 23, the infrared ranging sensor fixing bracket 24, the industrial camera fixing bracket 25, the industrial camera 26,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More