

Radar altimeter assistance method aiming to inertial navigation
A technology of inertial navigation and altimeter, applied in the field of navigation, can solve the problems of reducing the cross-coupling effect of accelerometers, not completely autonomous navigation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
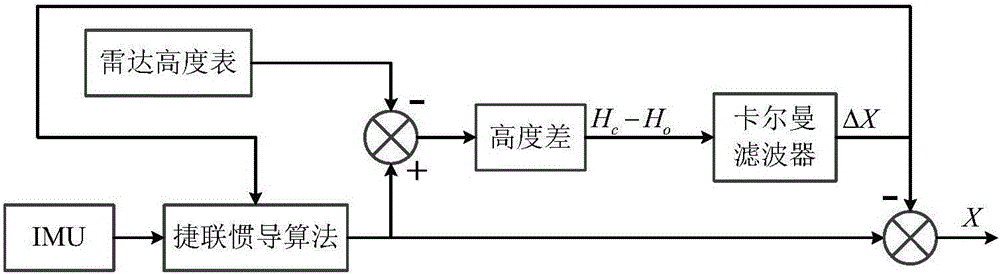
[0010] For strapdown inertial navigation system (SINS), utilize the present invention based on the system quantity measurement that radar altimeter (RA, Radar Altimeter) obtains to set up SINS / RA integrated navigation system, adopt the indirect feedback correction type Kalman filter, filter result feedback on the one hand The inertial navigation system corrects the deviation, and on the other hand corrects the state output at the current moment, which realizes the estimation of the aircraft position and reduces the position drift error.
[0011] (1) Establish a measurement model
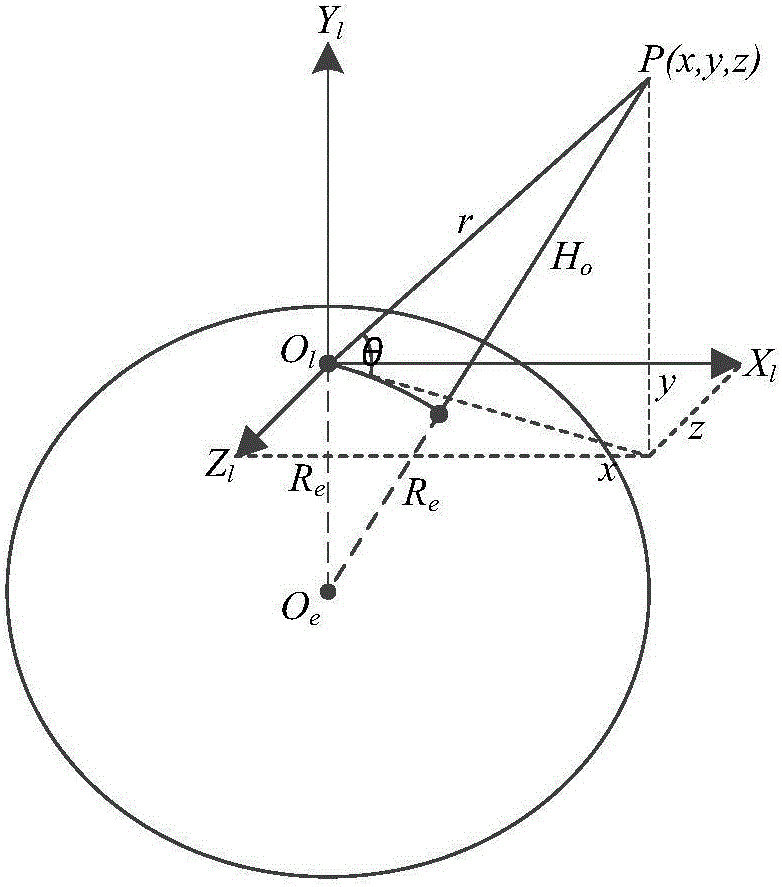
[0012] Such as figure 1 As shown, R e is the radius of the earth. In the launching inertial coordinate system O l -X l Y l Z l (hereinafter referred to as the l system, and as a navigation coordinate system), the angle θ between the position vector r and the horizontal plane of the launching point satisfies
[0013] s i n θ = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More