

Multi-sensor-based autonomous obstacle avoidance navigation system
A navigation system and multi-sensor technology, applied in the direction of navigation calculation tools, etc., can solve the problems of high fault tolerance, poor system robustness, restricting automatic navigation of robots, etc., to achieve flexible design, improve application fields, improve robustness and fault tolerance sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
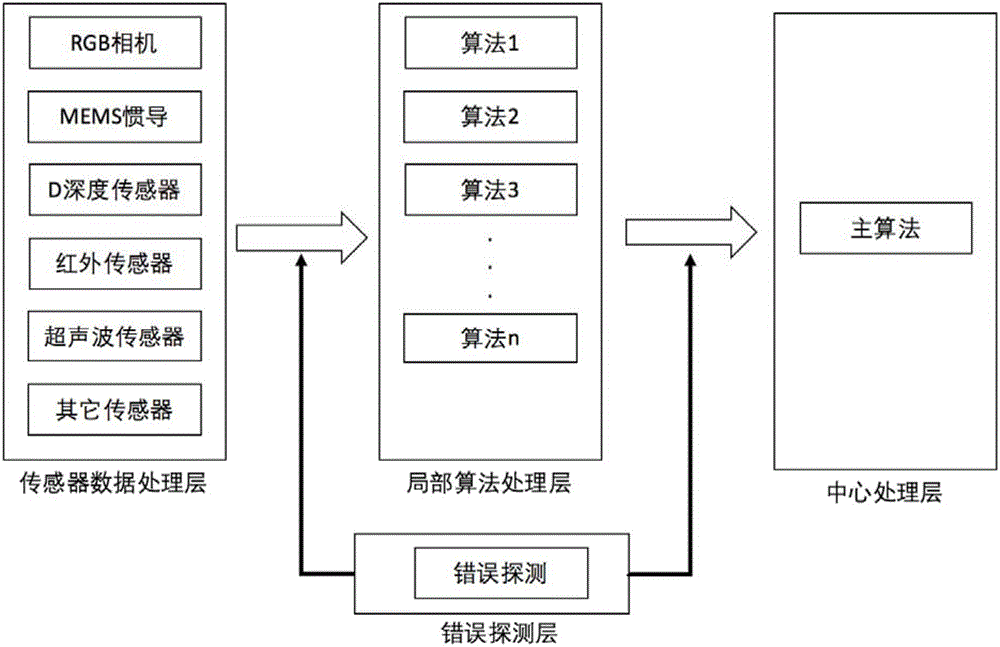
[0050] A design and implementation method of an adaptive environment autonomous obstacle avoidance navigation system, including a positioning and drawing subsystem based on a decentralized fusion design, an obstacle avoidance subsystem and a path planning subsystem.
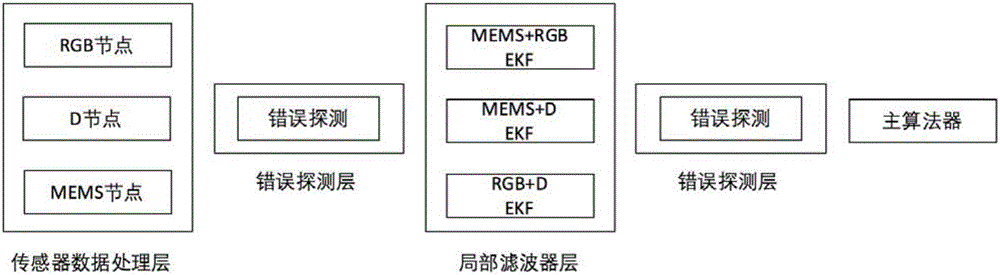
[0051] The positioning and mapping subsystem uses RGB-D sensors and MEMS inertial navigation sensors to quickly draw three-dimensional maps and position them. This subsystem can detect hardware faults and data errors of the MEMS sensor, RGB (color camera) and D (depth camera), and select an appropriate combination algorithm to achieve positioning and mapping.
[0052] The obstacle avoidance subsystem uses infrared sensors, ultrasonic sensors and D sensors to obtain the distance from itself to obstacles. The subsystem can detect the hardware failure and data error of each sensor, and choose the appropriate strategy to determine the distance between itself and the obstacle.
[0053] The path planning subsystem imp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More