

A multi-axis motion control method based on data-driven and parameter hybrid optimization
A control method and multi-axis motion technology, applied in digital control, program control, electrical program control, etc., can solve problems such as unsatisfactory control effect, difficulty in online setting of control parameters, and influence on coordination and control accuracy of multi-motor drive systems. , to achieve the effect of ensuring stability and anti-interference, simple design and easy realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Below in conjunction with specific embodiment, further illustrate the present invention. It should be understood that these examples are only used to illustrate the present invention and are not intended to limit the scope of the present invention. In addition, it should be understood that after reading the teachings of the present invention, those skilled in the art can make various changes or modifications to the present invention, and these equivalent forms also fall within the scope defined by the appended claims of the present application.
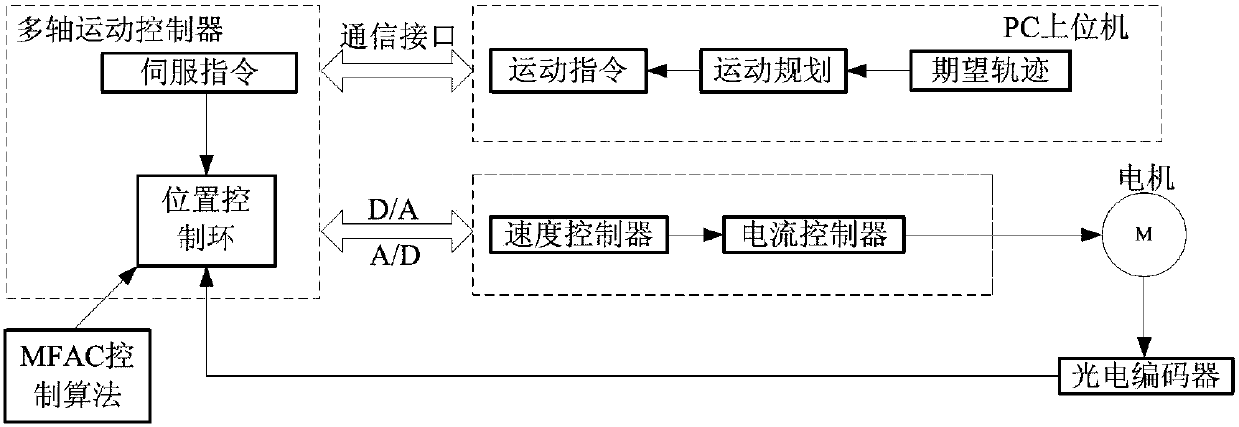
[0030] figure 1 It is a block diagram of the control system of a data-driven multi-motor drive system, in which the PC host computer can complete task space and joint space trajectory planning, control algorithm compilation and operation, real-time display of robot pose, virtual teaching, human-computer interaction, etc. Function. The multi-axis motion controller receives the target control instructions from the PC host compu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More