High-precision multi-joint serial connection mechanical arm anti-kinematics solution
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A robotic arm and multi-joint technology, applied in informatics, special data processing applications, instruments, etc., can solve problems such as non-unique solutions, slow solution speeds, and low precision
Active Publication Date: 2016-09-28
WUHAN FENJIN INTELLIGENT MACHINE CO LTD
View PDF2 Cites 13 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0005] The present invention is mainly to solve the technical problems of low stability, low precision, slow solution speed and non-unique solution in the prior art; it provides a stable, fast, accurate and unique solution to the kinematics of the mechanical arm inverse solution
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
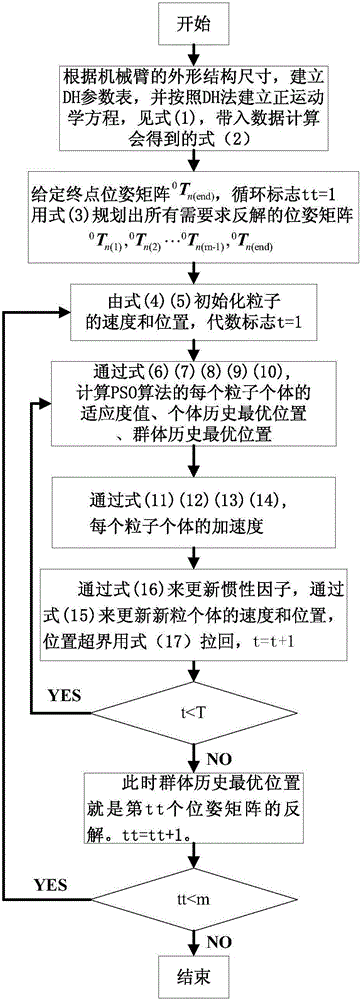
[0092] The invention provides a high-precision method for solving the motion posture of a multi-joint tandem mechanical arm, which includes:
[0093] Step 1: Establish the DH parameter table according to the external structure size of the mechanical arm, and establish the positive kinematics equation according to the DH method:
[0094] 0 T n = 0 T 1 · 1 T 2 … n-1 T n (18)
[0095] Where n is the total number of joints of the robotic arm;
[0096]
[0097] Where n=[n x ,n y ,n z ] T , O=[o x ,o y ,o z ] T , A=[a x ,a y ,a z ] T , P=[p x ,p y ,p z ] T ; N, o, a are the attitude vector, p is the position vector; n x ,n y ,n z ,o x ,o y ,o z ,a x ,a y ,a z , P x ,p y ,p z The specific expression of only contains θ 1 ,θ 2 …Θ n These n joint angle variables; the i-1 T i Where i=1, 2,...n; the fixed DH coordinate system on the i-1 link connected to the i joint is used as the base coordinate, and the fixed DH coordinate on the i link connected to the i joint The pose conversion matrix relat...
Embodiment 2
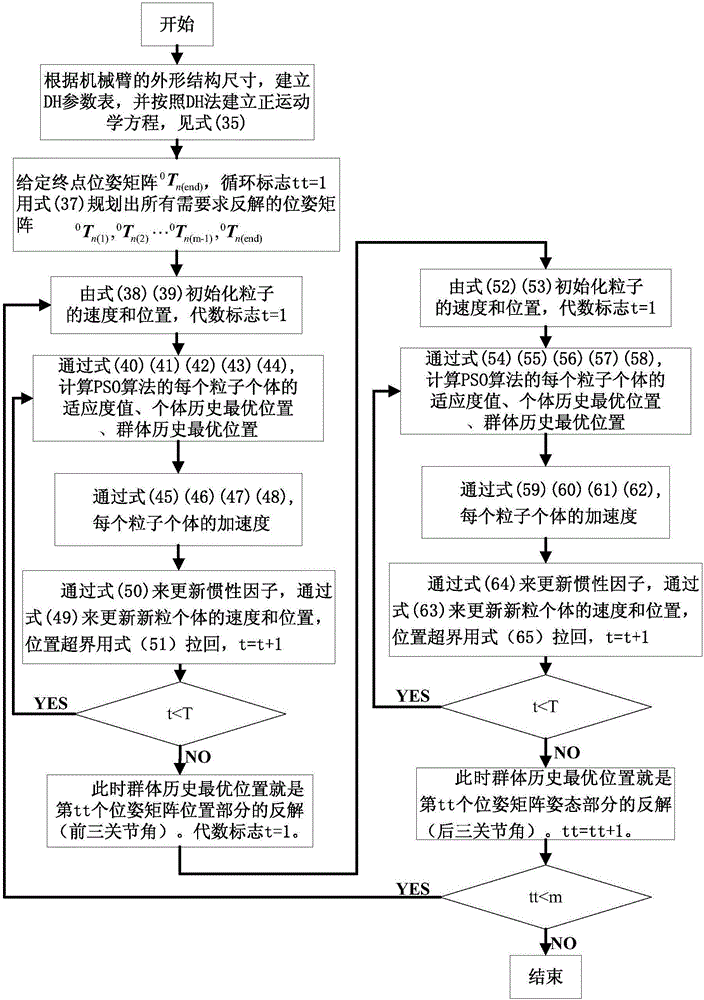
[0147] The invention provides a high-precision method for solving the motion posture of a multi-joint tandem mechanical arm, in particular to a mechanical arm with a 6-joint structure that satisfies the piper criterion.
[0148] Assuming that the robotic arm is a 6-joint structure that meets the piper criterion, the rear three joint axes intersect at one point, and the positive kinematics position equation does not include the rear three joint angles, the position and posture can be used to find the inverse solution step by step to further improve The accuracy of the inverse solution and the method of inverse solution follow the steps below:
[0149] Step 1: Establish the DH parameter table according to the external structure size of the robot arm, and establish the positive kinematics equation according to the DH method
[0150] 0 T 6 = 0 T 1 · 1 T 2 · 2 T 3 · 3 T 4 · 4 T 5 · 5 T 6 (35)
[0151] It can be calculated:
[0152]
[0153] n is the total number of joints of the robotic ar...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to a high-precision multi-joint serial connection mechanical arm anti-kinematics solution. A hybridparticle swarm optimization and gravitational search algorithm (PSOGSA) is used, a formula (please see the formula in the description) of a nonlinear weight distribution coefficient s is introduced, the early stage of algorithm design is partial to the gravitational algorithm, and the middle stage and the later stage of algorithm design are partial to the particle swarm optimization, so that search efficiency is improved. Three improvement strategies including improvement point dynamic and narrow boundary, non-linear time-varying weight and local optimal correction combination and super-inter-belt weak directivity return diffusion are adopted. By means of the algorithm and the improvement strategies, a unique inverse solution is obtained within a small number of iteration, errors are always stabilized in the 10<-8> level, and theoretical calculation time can be reduced to 2.58 ms each time. According to the special structure mechanical arm with three shafts intersected at a point, the position and posture separation inverse solution strategy is used, solution performance can be further improved, the errors can be reduced to 10<-14> level, and theoretical calculation time can be reduced to 1.597 ms each time.
Description
Technical field [0001] The invention relates to the kinematics solution technology of a multi-joint series manipulator, in particular to a solution method for the kinematics inverse solution of a high-precision series manipulator without inverse triangulation calculation. The solution is based on the improved Gravity Particle Swarm Optimization (PSOGSA). Background technique [0002] The multi-joint tandem manipulator is a complex electromechanical object. It not only involves mechanical design, processing, and assembly, but also involves the selection and drive of electrical motors, and also involves kinematics and dynamics in control. Basic multi-joint coordination control algorithm. Among them, kinematics is the basis of any control, because it is used to calculate the relationship between the end pose of the robotic arm and the angle of each joint. Among them, obtaining the robot end pose from the joint angle is called the positive kinematics solution, and the expression ca...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More