

A Two-axis Trajectory Interpolation Algorithm for Manipulator
An interpolation algorithm and two-axis trajectory technology, applied in the field of manipulators, can solve problems such as high cost, poor operation flexibility and versatility, and difficult development, and achieve the effects of sensitive control response, low program maintenance cost, and high production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
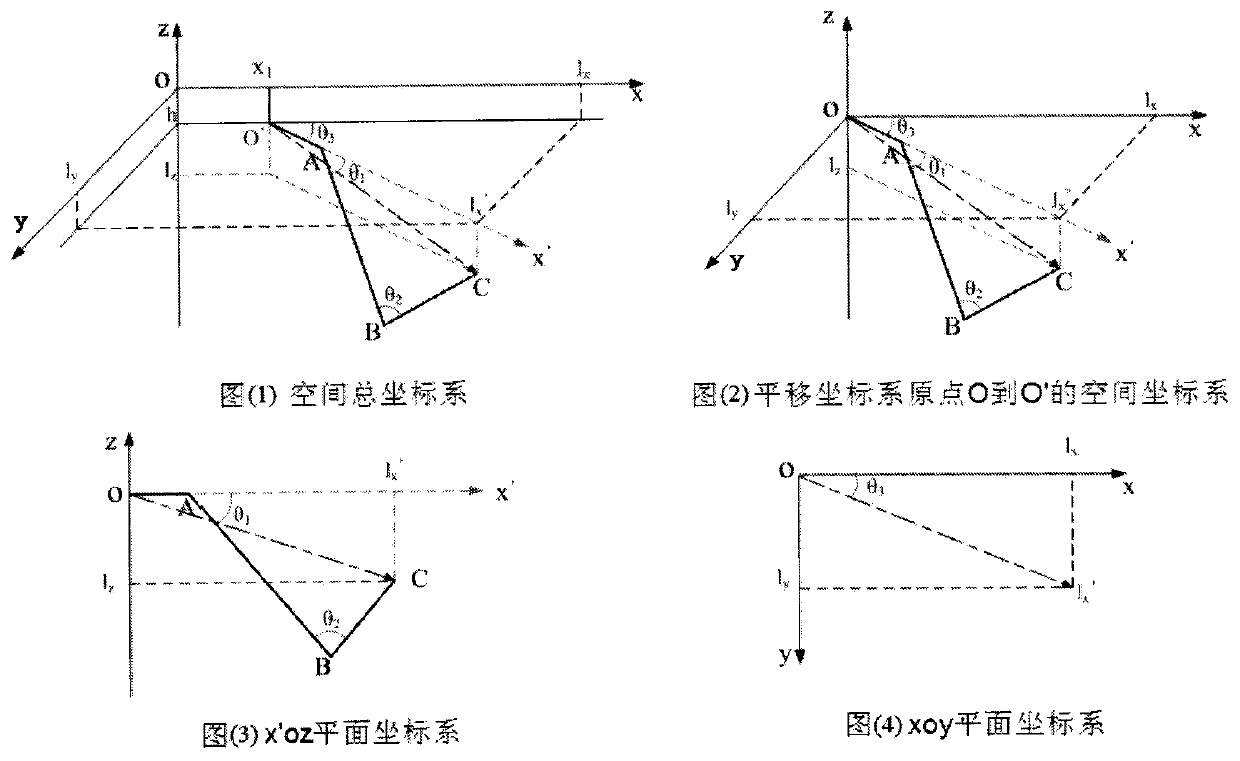
[0018] figure 1 In the coordinate positioning diagram of the manipulator, figure (1) is the total space coordinate system, and the origin of the coordinate system is established at the center of the limit position at the left end of the platform guide rail, where h is the vertical distance from the middle plane of the guide rail to the arm L1 of the manipulator (since h is unknown, the formula h is temporarily taken as 0). It can be seen from the figure that the coordinates of point C are (x 1 + lx, ly, lz).
[0019] In Figure (2), the origin of the coordinate system is translated to O', we know that O, A, B, and C are in the same plane, then lx' can be solved in the x'oz plane coordinate system, as shown in Figure (3), we can got lx'
[0020] l x '=a+AB·cosθ 1 -BC·cos(θ 1 -θ 2 )
[0021] Also available lz
[0022] l 2 ′=BC·sin(θ 1 +θ 2 )-AB·sinθ 1
[0023] Similarly, from Figure (4) can be solved lx, ly
[0024] l x = l x ′·cosθ 3 =(a+AB·cosθ 1 -BC·cos(θ 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More