

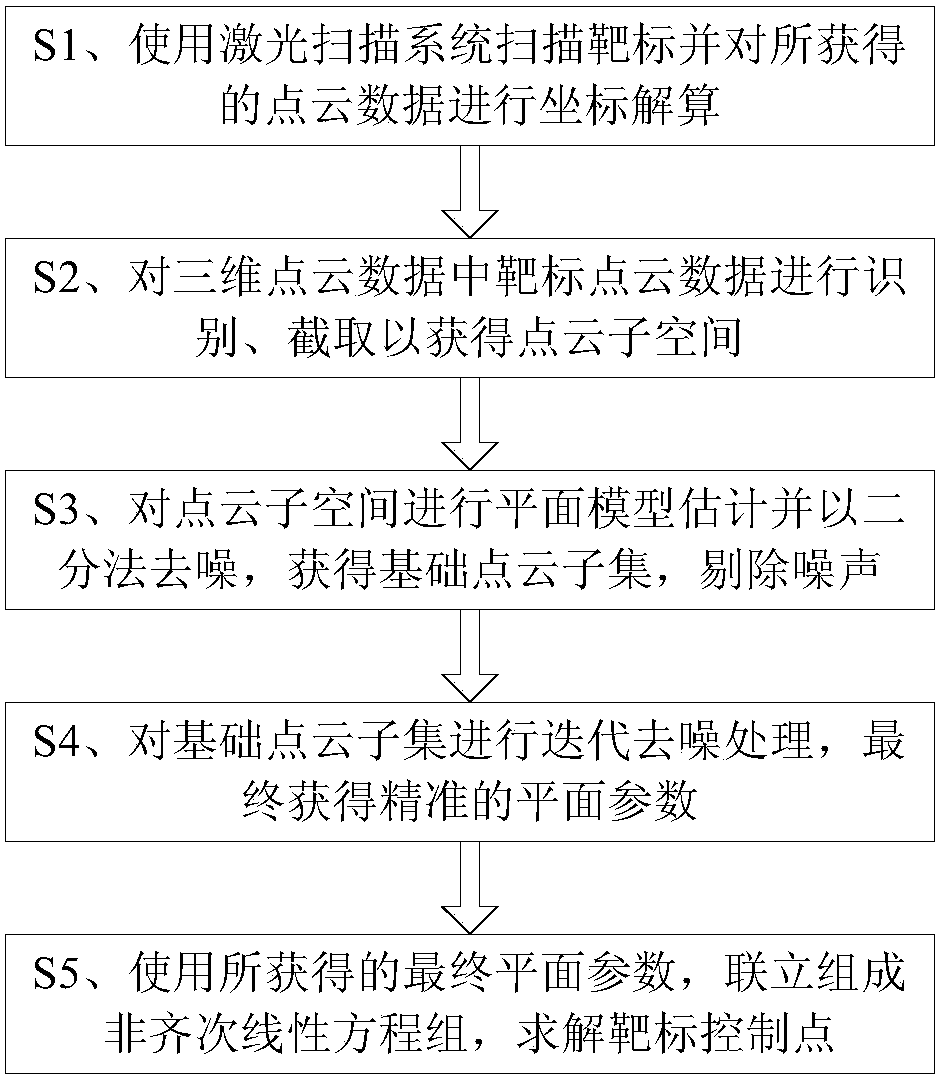
A method for extracting targets and control points suitable for fast scanning scenes
A fast scanning and extraction method technology, applied in the direction of optical devices, image enhancement, instruments, etc., can solve the problems of not being able to scan point cloud data information at one time, difficult production, large scanning error, etc., to improve computing efficiency and High accuracy, applicability and reliability, and the effect of improving production precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0049] The present embodiment will be described in detail below in conjunction with the accompanying drawings.
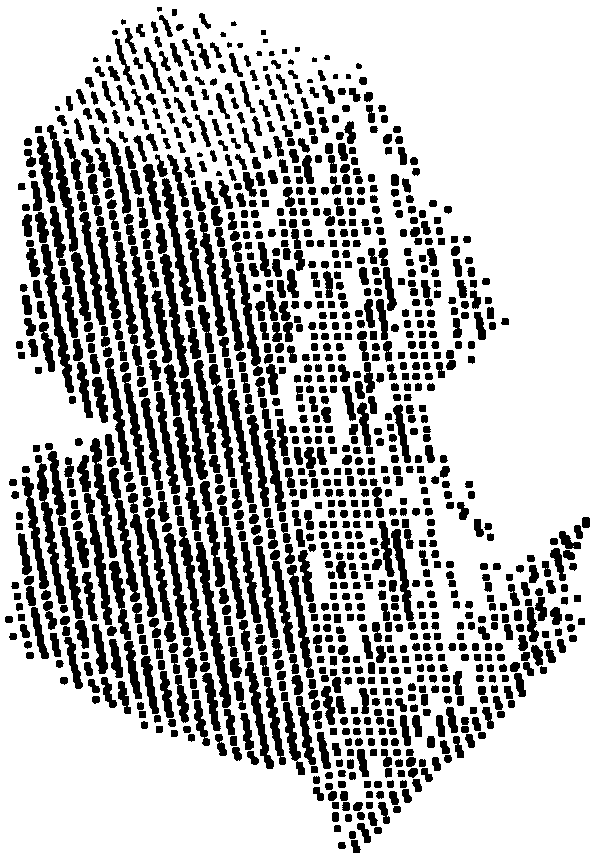
[0050] Such as figure 1As shown, the three-plane target includes a target 1 and a connecting column 2. The connecting column 2 lifts the target 1 off the ground to obtain a suitable height for scanning by the laser scanning system, and under the action of the connecting column 2, the target 1. It avoids the interference objects that may exist in the background area, and facilitates the identification and extraction of the point cloud data belonging to the target in the scanned point cloud data. The target surface of the target 1 is composed of three non-parallel planes X, Y, and Z. The X, Y, and Z planes intersect at one point, which is the control point of the target. The angle between the X and Y planes is an obtuse angle, and the angle between the intersection line of the X and Y planes and the Z plane is also an obtuse angle, which is beneficial to increase the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More