Servo parameter self-tuning method based on error measurement for numerical control system
A technology of parameter self-tuning and numerical control system, applied in general control system, control/adjustment system, program control, etc., can solve problems such as labor-consuming, time-consuming, and influenced by human factors, so as to improve efficiency, save time and human resources , The effect of eliminating the influence of human factors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
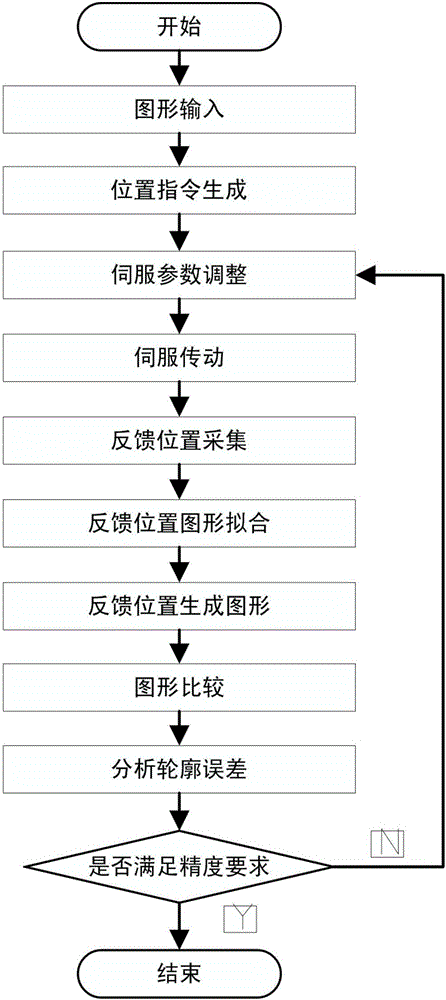
[0024] Taking the X, Y dual-axis servo transmission system as an example, first determine the parameters of the inner speed loop. The speed loop gain Kv affects the response speed of the servo. On the premise that the servo system is stable, the speed loop gain should be increased as much as possible to improve the speed loop response speed. Choose different speeds to process a straight line and analyze whether there is oscillation through the error measurement results. When oscillation occurs, it proves that the speed loop gain parameter setting is too large. At this time, reduce the speed loop gain by an appropriate amount until there is no oscillation, and complete the speed loop tuning process.
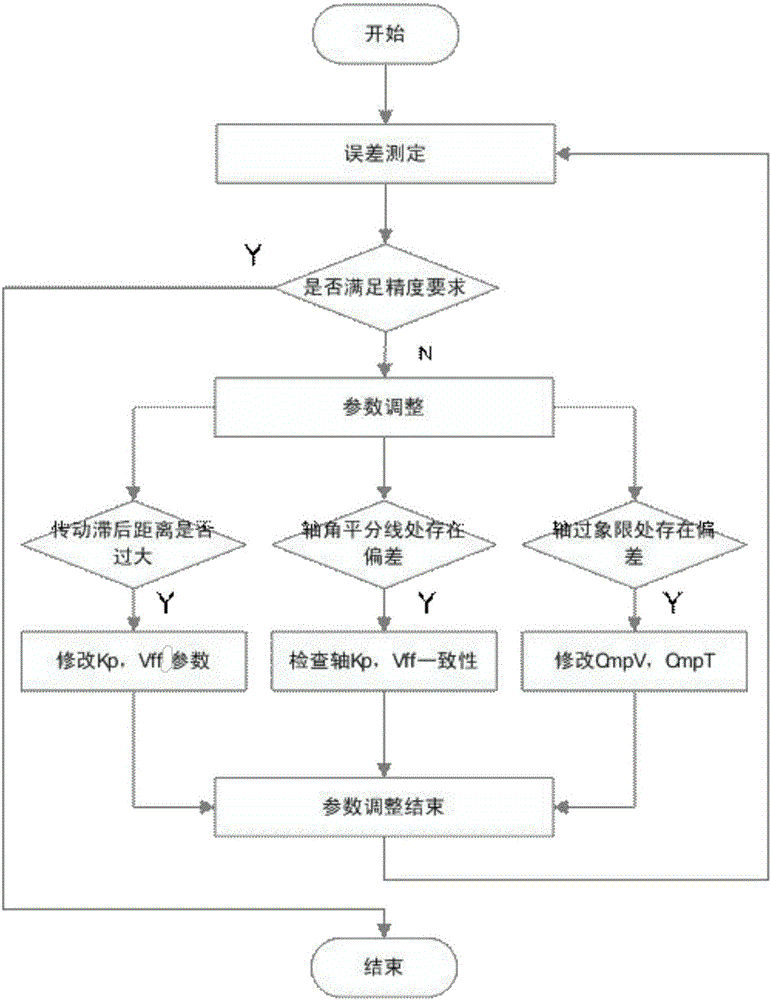
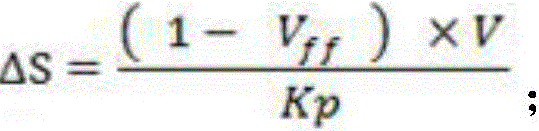
[0025] After the speed loop tuning is finished, start to tune the position loop gain Kp and the speed feed-forward compensation parameter Vff. By analyzing the Bode diagram of the servo control system and the theoretical derivation of the servo system transfer function, in order t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



