

Transformer substation inspection robot holder control method based on visual servo
A patrol inspection robot and visual servo technology, applied in the direction of non-electric variable control, attitude control, control/adjustment system, etc., can solve the problems of inspection collection image deviation, equipment area deviation, short movement distance, etc., to save labor Effects of labor resources, ensuring safe operation, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
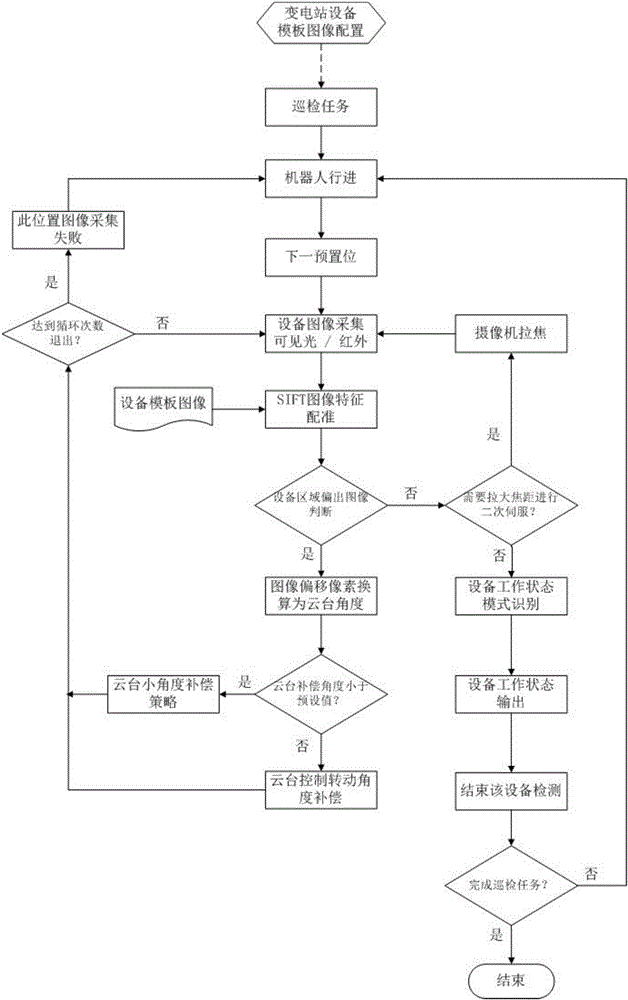
[0058] The present invention will be further defined below in conjunction with the accompanying drawings and specific embodiments.
[0059] A visual servo-based control method for the substation inspection robot pan / tilt. First, the work of configuring the inspection robot includes saving the equipment images of each preset position of the substation taken by the robot into the template library, and the equipment area to be inspected It is presented in the center of the image with a suitable size, and the equipment area to be detected is manually marked in the template image. The equipment image in the template library corresponds to the equipment position of the substation one by one. When assigning inspection tasks to the robot, it is necessary to clearly point out the parameters (such as the angle of the pan / tilt, the focal length of the camera, etc.) of the template image taken at each preset parking space. Finally, adjust the attitude according to the acquisition method o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More