

A Bionic Intelligent Obstacle Avoidance Method for UAV Based on Optical Flow
A technology of unmanned aerial vehicles and optical flow, which is applied to computer parts, color TV parts, TV system parts, etc., can solve the problems of UAV resource constraints and experimental difficulties, and the application is still in its infancy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The technical solution of the present invention will be described in further detail below in conjunction with the accompanying drawings.
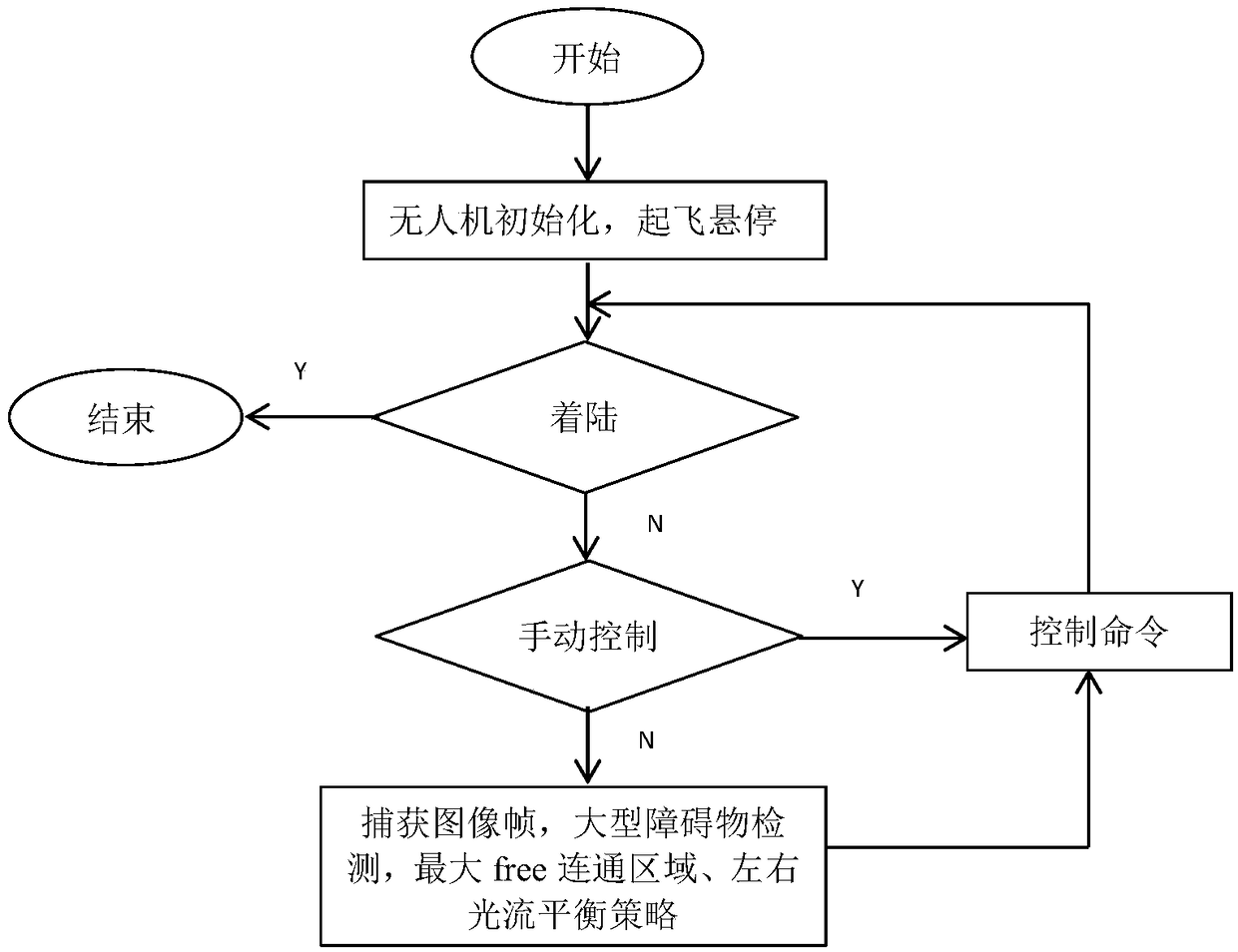
[0051] figure 1 The overall flowchart of the UAV obstacle avoidance system involved in the present invention is given. At the beginning, the UAV starts to hover, and judges whether the current control instruction is a landing, and if it is a landing instruction, it ends. If it is not a landing command, judge whether the current control is manual control, if it is manual control, directly send the control command to the UAV, if it is optical flow control, then capture the image frame processing to get the corresponding control command and send it to the UAV.
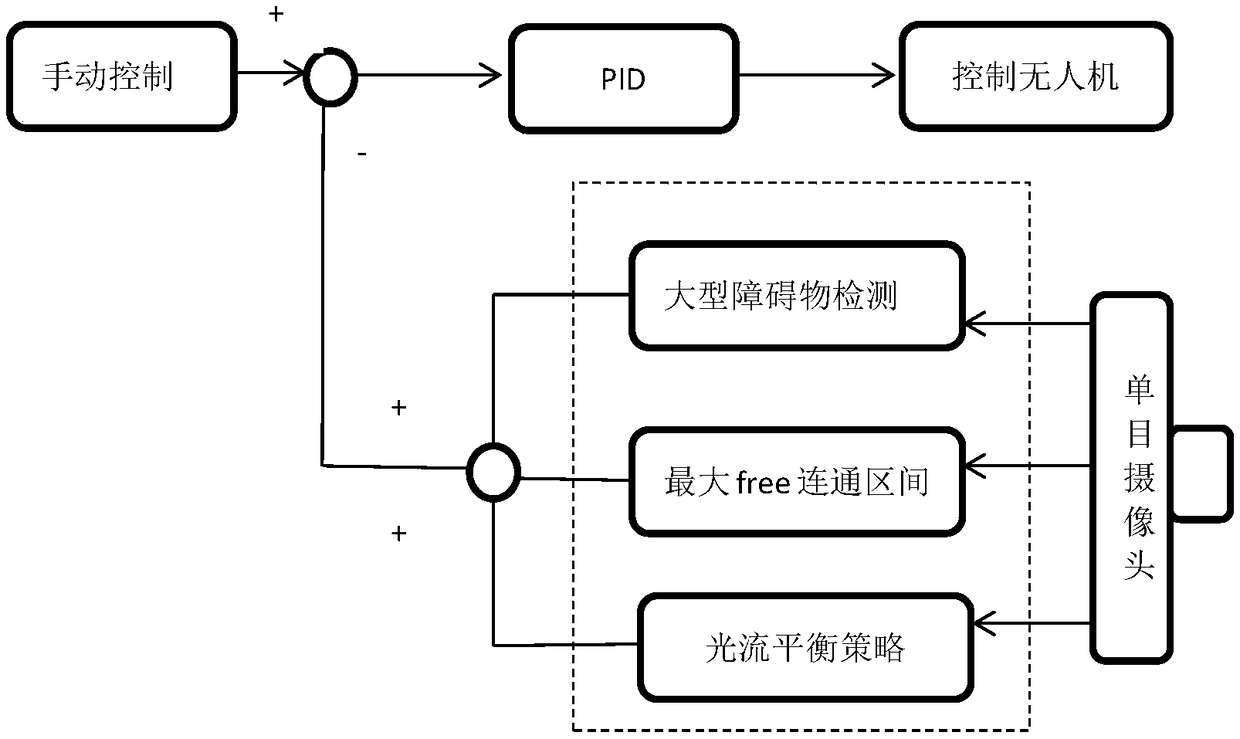
[0052] figure 2 A control block diagram of the UAV involved in the present invention is given. The UAV control module is composed of two parts: manual module and automatic module. The manual control module directly sends control commands to the drone to control the flight o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More