

Head real-time control system and method for small unmanned aerial vehicle for land survey
A real-time control system and technology of small drones, applied in the direction of using feedback control, etc., can solve problems such as blurred image focus and processing difficulty, and achieve the effect of reducing difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
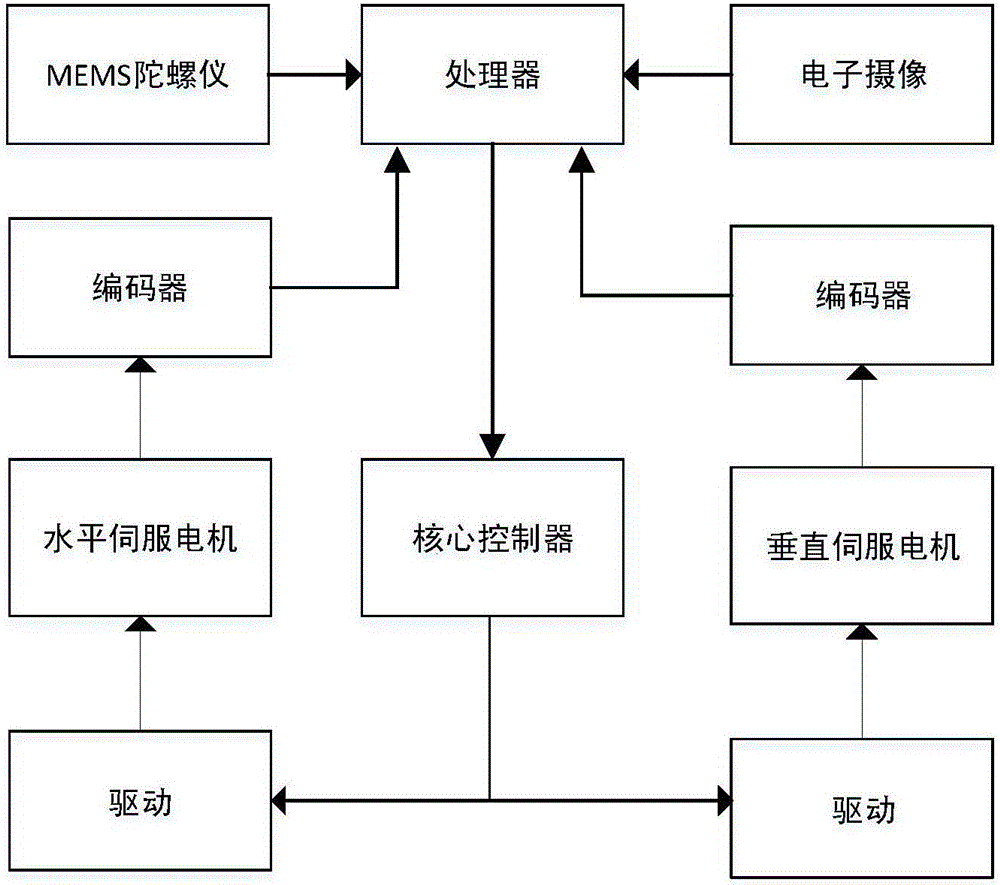
[0047] The control system of the present invention is installed at a suitable position above and below the frame of the UAV, which can control three brushless motors perpendicular to each other, so as to set up a control platform for the camera as a pan-tilt. It is also necessary to set up the minimum flight control system pixhawk on the drone. The pixhawk comes with MEMS sensors and can stabilize the stability of the fuselage to a certain extent.
[0048] Calibrate and place the reference point in the area to be measured, and use it as the reference point for the calculation of the inclination angle of the monocular camera.
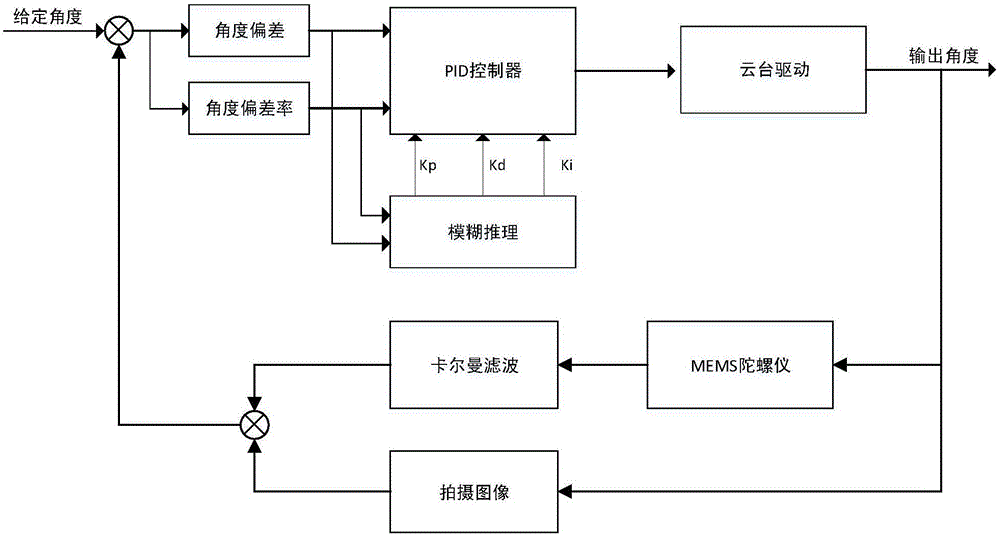
[0049] After the preparatory work is completed, the drone is lifted into the air and the monocular camera calculates the inclination angle of the camera according to the reference point during the vertical aerial photography. Acceleration, velocity, and tilt angle, and the tilt angle is filtered by Kalman to reduce the influence of the white noise error ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More