

Portable combined zero-adjustment high dynamic precision large working distance autocollimation device and method
A highly dynamic and portable technology, applied in the field of precision measurement and optical engineering, it can solve the problems that self-collimation and micro-angle measurement cannot be realized, the reflected beam deviates from the entrance pupil, and the range cannot be too large, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
[0084] This embodiment is an embodiment of a portable combined zeroing high dynamic precision and large working distance autocollimation device.
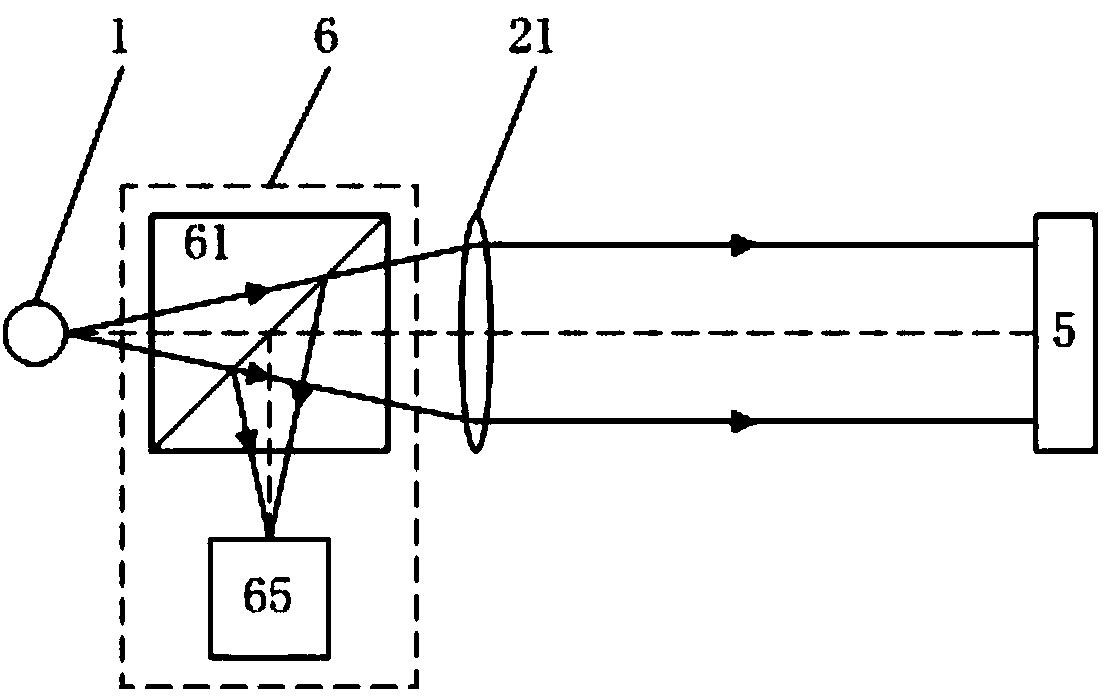
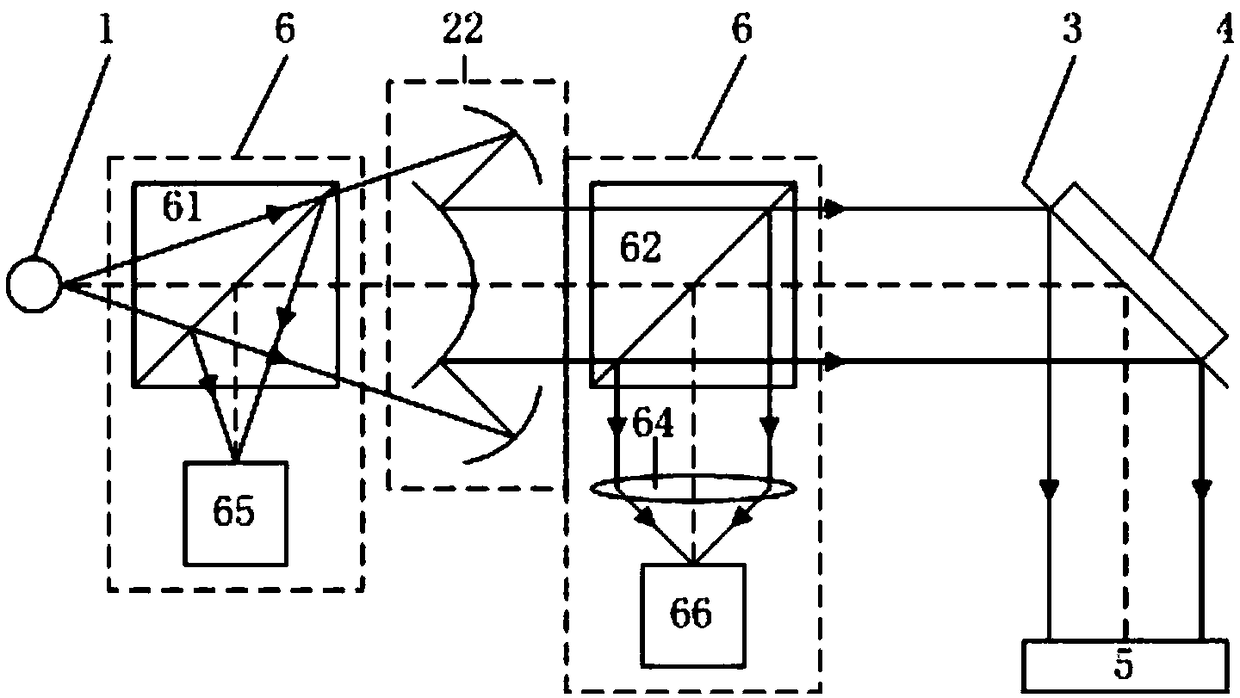
[0085] The portable combined zeroing high dynamic precision and large working distance self-collimation device of this embodiment has a schematic structural diagram as figure 2 shown. The self-collimation device includes a light source 1, a reflective collimator 22, a reflector 3, and a feedback imaging system 6. The reflector 3 is provided with an angle adjustment measuring device 4; the light beam emitted by the light source 1 passes through a reflective collimator After the straight mirror 22 is collimated into a parallel light beam, it is reflected by the mirror 3 and incident on the surface of the measured object 5; the light beam reflected from the surface of the measured object 5 is then reflected by the mirror 3 and collected by the feedback imaging system 6 imaging;
[0086] The feedback imaging system 6 includes an imag...
specific Embodiment 2
[0093] This embodiment is an embodiment of a portable combined zeroing high dynamic precision and large working distance autocollimation device.
[0094] The portable combined zeroing high dynamic precision large working distance self-collimation device of this embodiment differs from the specific embodiment 1 in the structure of the feedback imaging system 6; the structure of the feedback imaging system 6 of this embodiment is the following two forms A sort of:
[0095] First, the feedback imaging system 6 includes a first feedback beam splitter 61, and an image sensor 65 and a four-quadrant detector 66 carried by a guide rail 68, such as Figure 6 Shown; Described guide rail 68 has two stop positions altogether, and a stop position makes image sensor 65 image plane centers correspond to the focus position of reflective collimating mirror 22, and another stop position makes four-quadrant detector 66 image plane centers correspond to reflective The focus position of the colli...
specific Embodiment 3
[0097] This embodiment is an embodiment of a portable combined zeroing high dynamic precision and large working distance autocollimation device.
[0098] The portable combined zeroing high dynamic precision and large working distance self-collimation device of this embodiment has a schematic structural diagram as Figure 8 shown. On the basis of the specific embodiment 1, the portable combined zeroing, high dynamic precision and large working distance self-collimation device of this embodiment is also provided with a wavefront detection system 7 and a wavefront compensation system 8;
[0099] The wavefront detection system 7 includes a wavefront detection spectroscope 71 and an air disturbance wavefront detector 72; the wavefront detection spectroscope 71 is arranged between the reflector 3 and the measured object 5, and the air disturbance wavefront detector 72 is arranged on the reflected optical path of the wavefront detection spectroscope 71, and the mirror deformation wa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More