

Method and system for realizing robot row identification and guiding based on laser radar detection
A technology of laser radar and robot, which is applied in the direction of control/adjustment system, instrument, two-dimensional position/channel control, etc. It can solve the problems of inability to provide obstacle distance information, no identification signs, complex unstructured road environment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
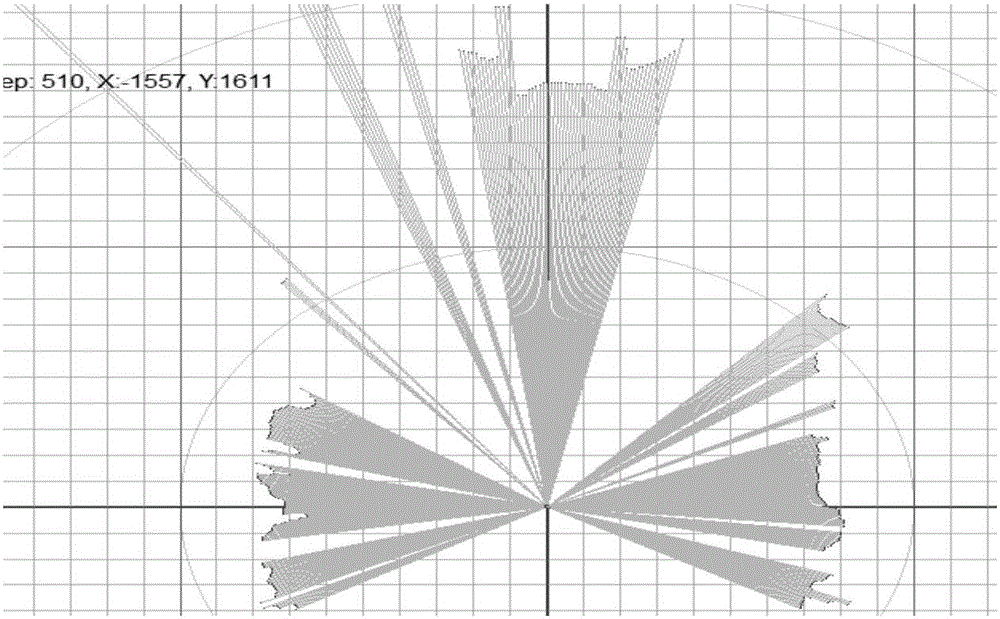
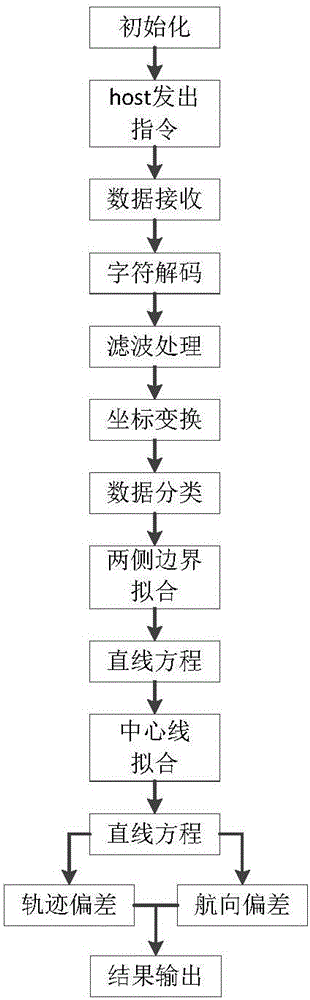
[0071] As a prerequisite for environmental perception, lidar ranging detects a distance value at a certain angle, and the collected environmental information is expressed in polar coordinates. The collected ridgeline environmental information is represented in the Cartesian coordinate system as figure 1 shown. With the help of lidar sensors for local path planning, based on lidar data acquisition and processing flow chart as shown in figure 2 shown.
[0072] The invention adopts the laser radar to collect the surrounding environment information. After the hardware is connected and the power is turned on, the lidar first completes the initialization process, and then the controller periodically sends instructions to the lidar to obtain the data collected by the lidar; in order to improve the efficiency of data transmission, a transmission protocol is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More