

Multiple-heterogeneous industrial robot control system
A technology of industrial robots and control systems, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., and can solve problems such as independent selection of PLC controller types, poor scalability, difficulty in running the same control algorithm for robot controllers, and insufficient programming flexibility. , to achieve the effect of improving flexibility and convenience, flexible collaborative control, and improving resource utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
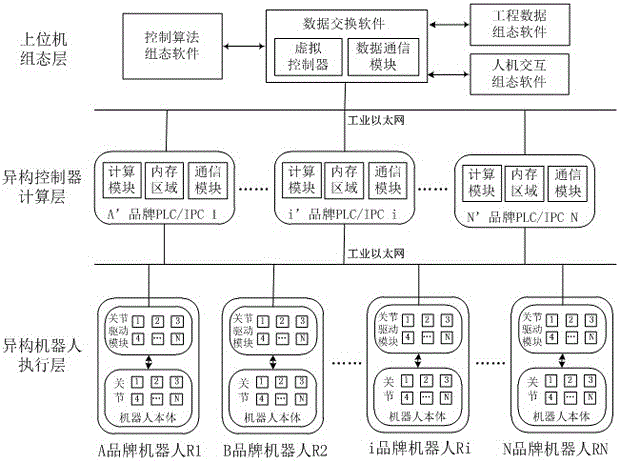
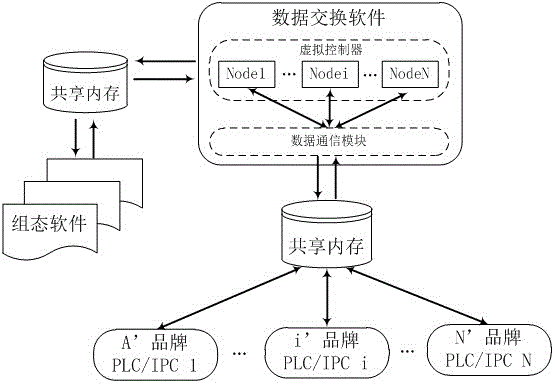
[0023] A multi-heterogeneous industrial robot control system of the present invention includes a heterogeneous robot execution layer, a heterogeneous controller calculation layer, and a host computer configuration layer;
[0024] The heterogeneous robot execution layer includes N different types of industrial robots, each industrial robot is composed of a mechanical arm body with multiple joints and multiple joint drive modules, which are used to drive the execution of robot pose actions;
[0025] The heterogeneous controller computing layer includes N' different types of PLC or IPC controllers, and each controller is composed of a computing module, a memory area, and a communication module; the function of each controller is used for: A, execution User control instructions from the configuration layer of the upper computer; B. Calculate ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More