

Indoor cloud robot angle positioning method based on position and visual information optimization
A technology of visual information and angle positioning, applied in geographic information databases, instruments, measuring devices, etc., can solve problems such as expensive equipment, inability to effectively parse out road sign picture information, and affecting indoor aesthetics.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be described in detail below with reference to the accompanying drawings and in combination with embodiments.
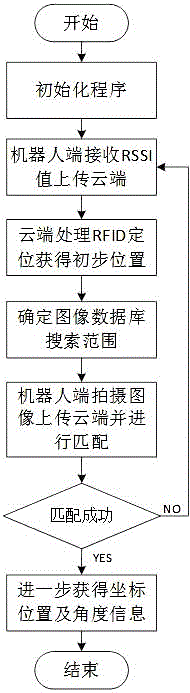
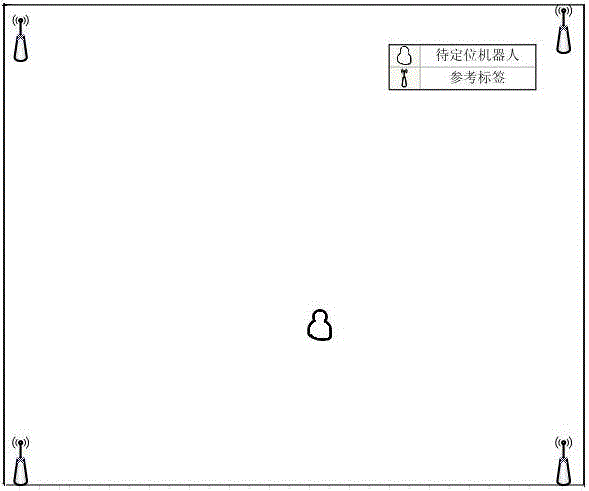
[0049] like figure 1 As shown, an indoor cloud robot angle positioning method based on position and visual information optimization, including the cloud, the mobile robot to be positioned, and the RFID reader and camera installed on the mobile robot, is characterized in that the method includes the following step:
[0050] Step 1) Receive preliminary positioning information, the mobile robot receives the signal strength RSSI sent by the active tag and its corresponding identification ID value through the RFID reader as the preliminary positioning information;
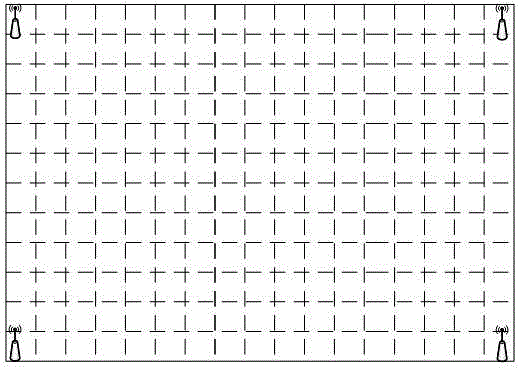
[0051] Step 2) Obtain preliminary position information, the mobile robot sends the received preliminary positioning information to the cloud, and the cloud calculates the preliminary position coordinates of the mobile robot based on the obtained RSSI value;
[0052] Step 3) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More