

Orchard work agricultural robot interrow positioning method
A positioning method and robot technology, applied in the directions of instruments, navigation, surveying and mapping, and navigation, can solve the problems of blocking satellite signals, positioning accuracy cannot meet application requirements, and satellite positioning information is no longer reliable, so as to meet operational requirements and avoid positioning. effect of error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The method of the present invention will be further described below in conjunction with the accompanying drawings. This embodiment is implemented on the premise of the technical solution of the present invention. Detailed implementation modes and specific operation procedures are given, but the protection scope of the present invention is not limited to the following 的实施例。 Example.
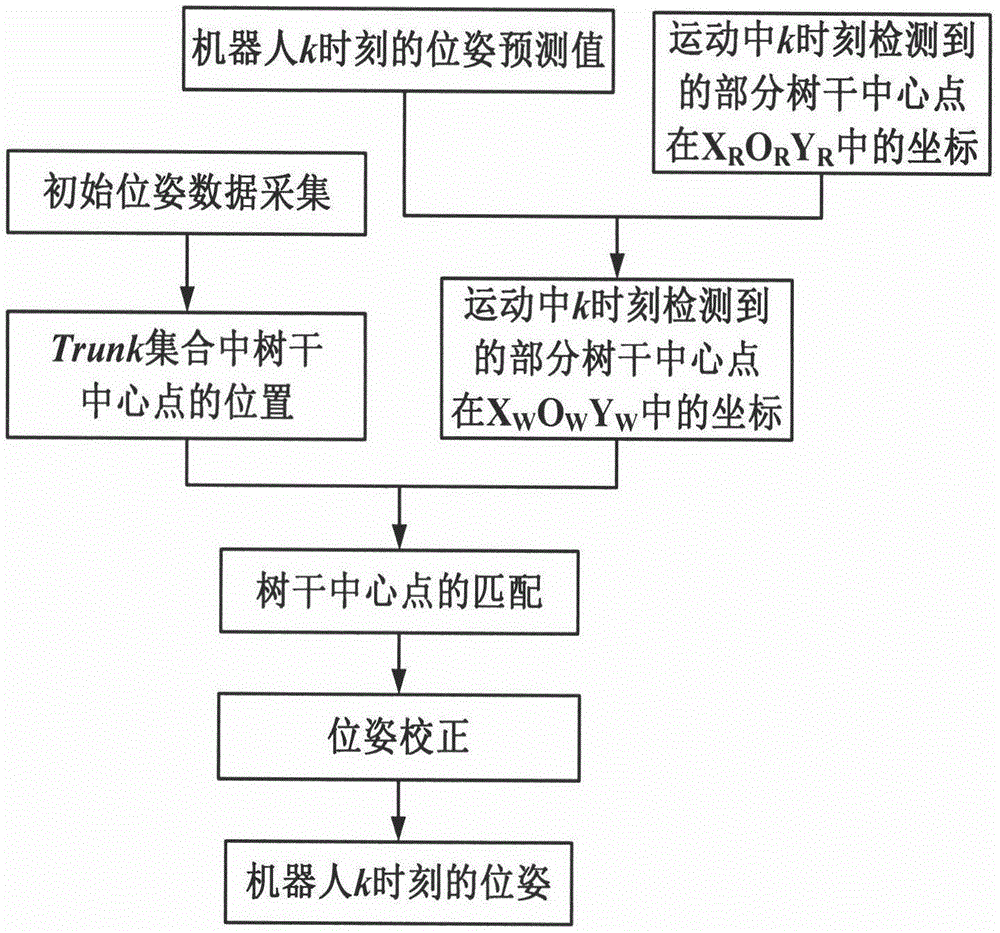
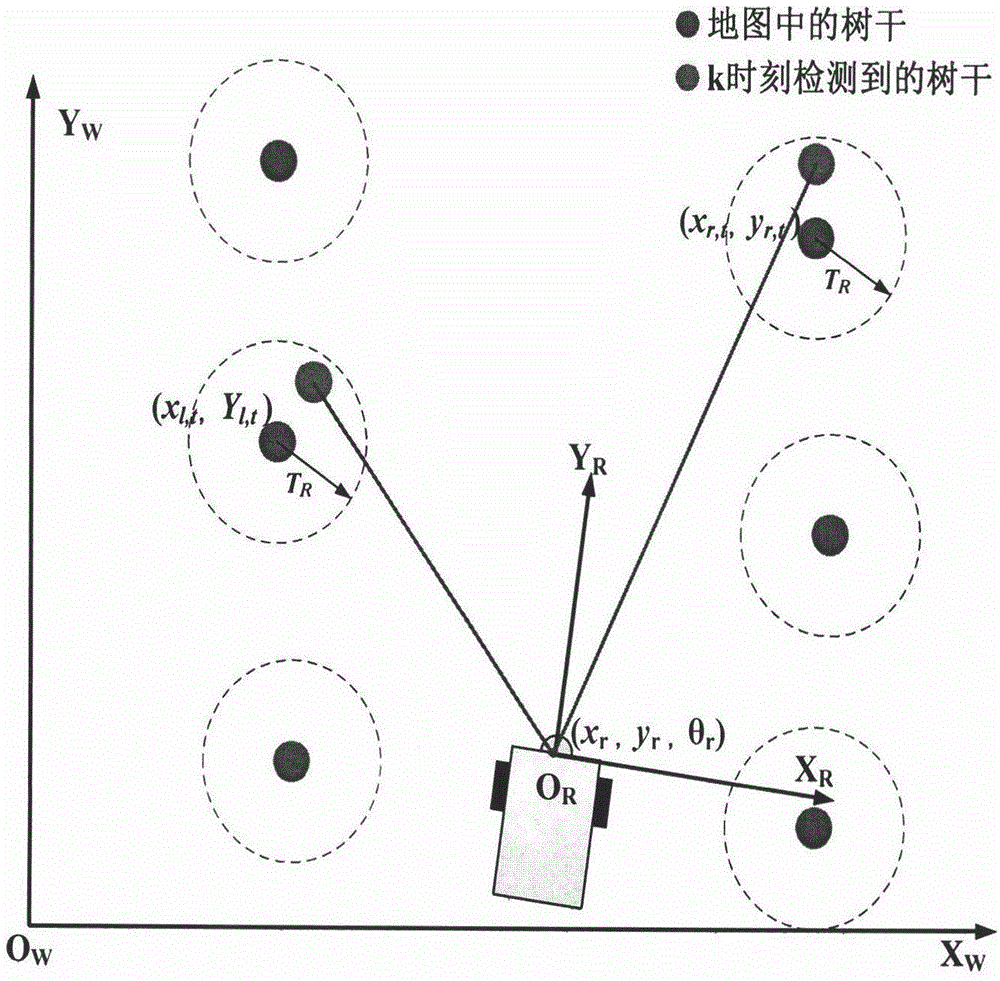
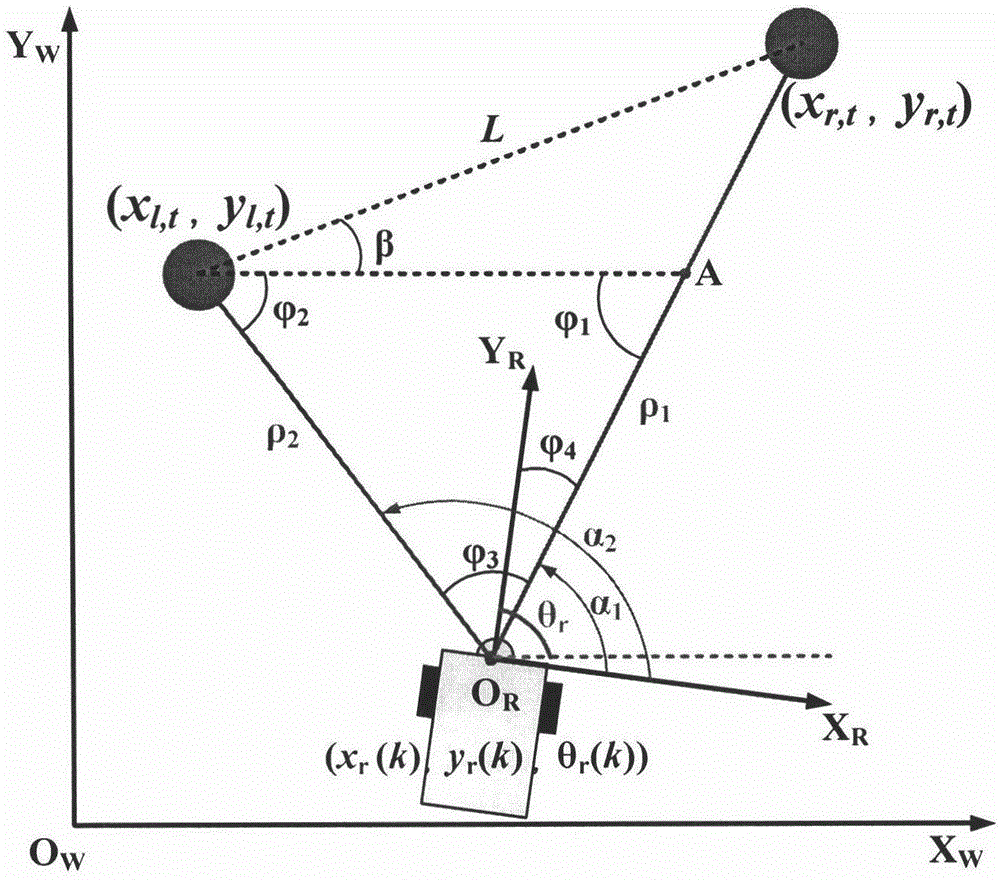
[0021] Such as figure 1 As shown, this embodiment includes: collecting two-dimensional lidar scanning ranging data at the initial pose of the robot movement, detecting the fruit tree trunks according to the Euclidean distance standard for the lidar ranging data, and storing them in the Trunk set of the world coordinate system. Based on the known positioning value at time k-1, the short-distance trajectory is calculated based on the odometer information to predict the pose value of the robot at time k, and the time k is in the robot coordinate system X R O R Y R Convert the coordinates of the cen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More