

Master-slave mode parallel robot system and method for femoral shaft fracture reduction
A robot and femoral shaft technology, applied in surgical robots, fixators, external fixators, etc., can solve the problem of long radioactive exposure time of surgeons, and achieve the effect of reducing X-ray damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
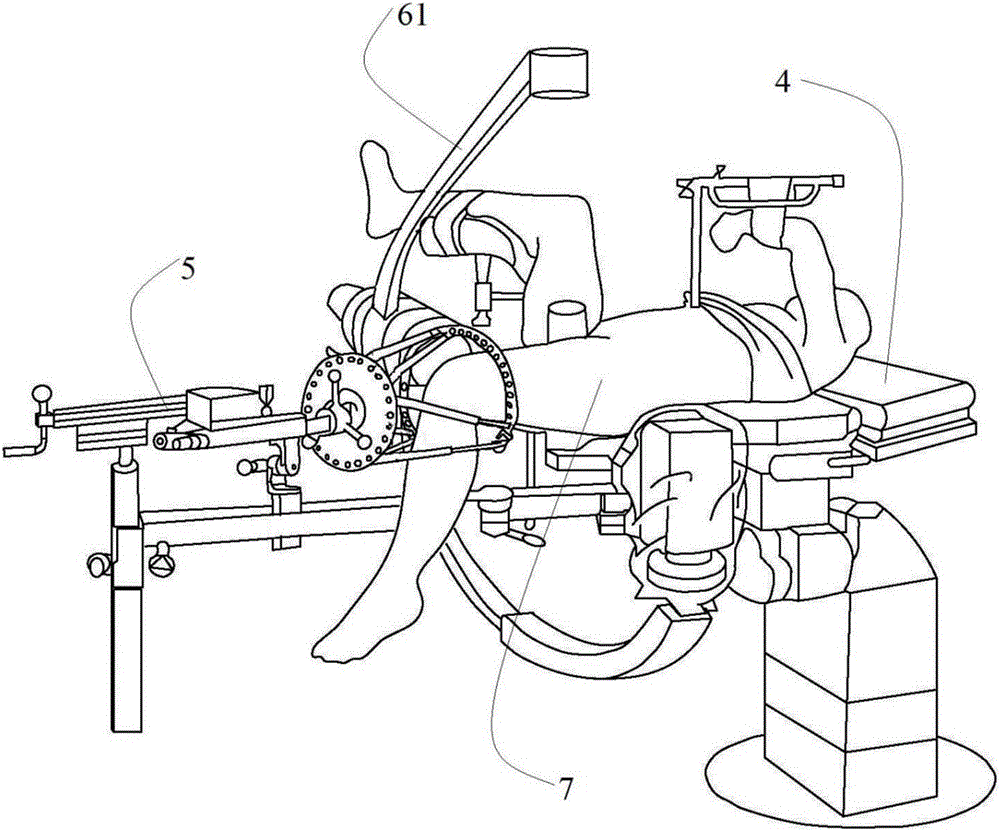
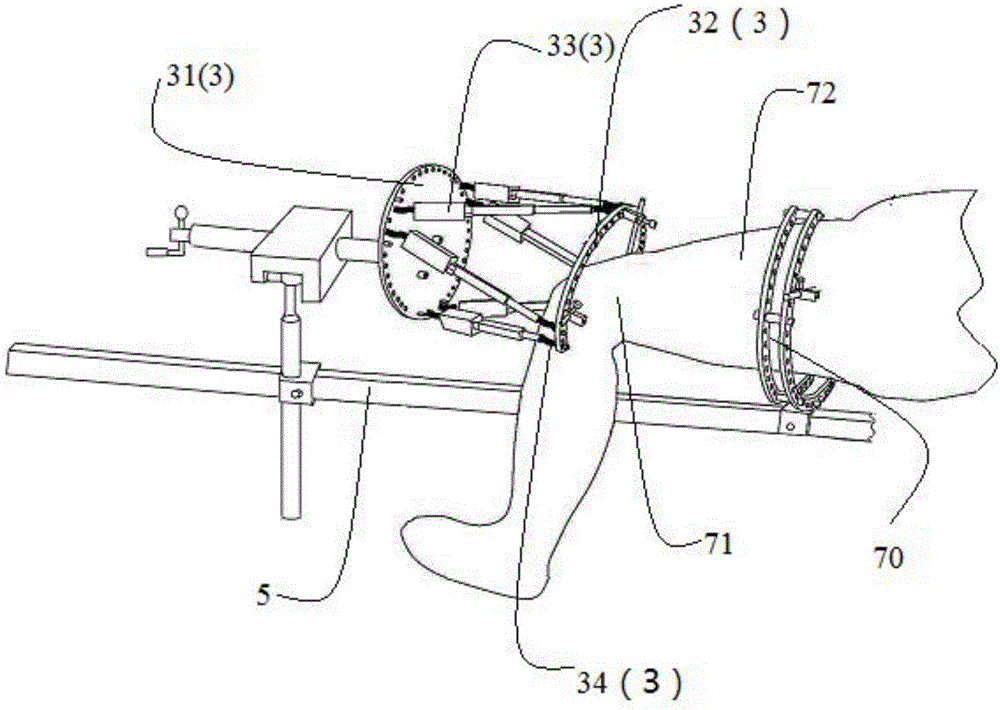
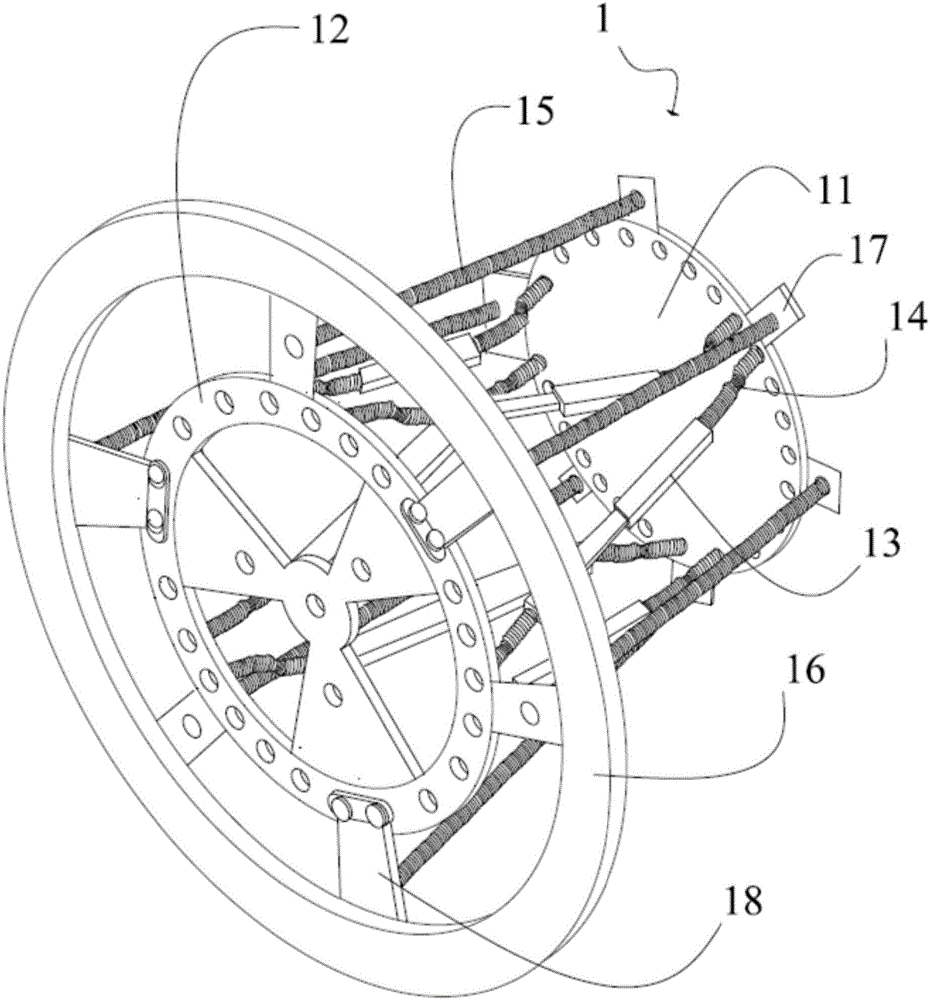
[0025] The use of Ilizanov (ILIZAROV) external fixator provides a new method for fracture reduction. It uses steel needles and nails to pass through the skin and fix the bone segments on both sides of the broken end, and its ends are respectively connected to the two rings of the external fixator. Since the two rings are respectively connected with the bone segments on both sides of the broken end to form two wholes, the relative movement of the two rings can drive the relative movement of the two broken bones to realize the reduction of the fracture. Stewart (STEWART) parallel robot is based on the principle of fracture reduction of Ilizanov external fixator, and connects two circular rings with six electric push-pull rods through six...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More