

Planetary wheel type obstacle crossing robot stair climbing control method
A control method and robot technology, applied to motor vehicles, transportation and packaging, etc., can solve the problems of complex structure, large mass, poor obstacle-crossing performance, and low load, so as to improve turning flexibility and turning precision, ensure stability, The effect of strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
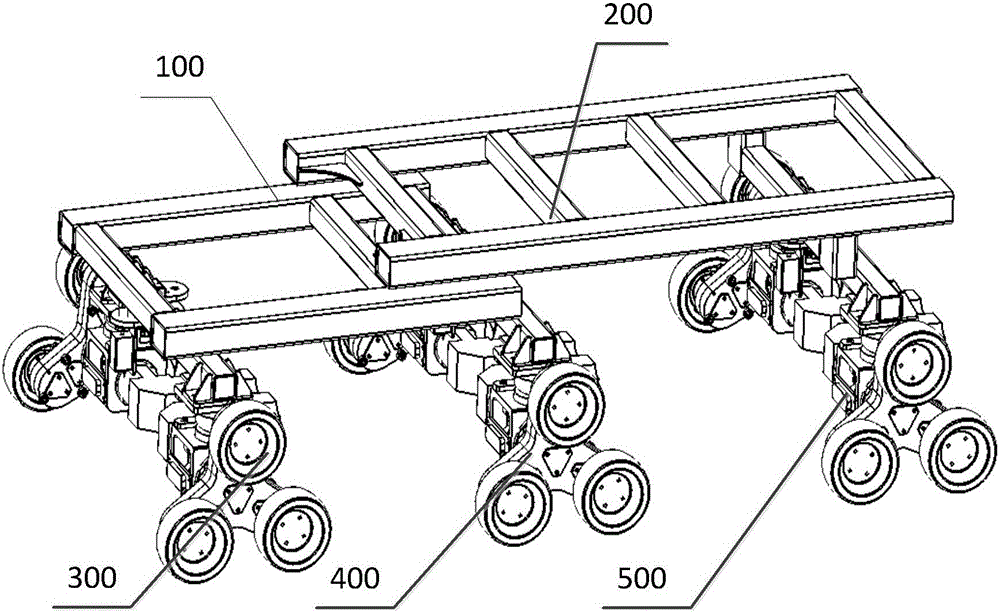
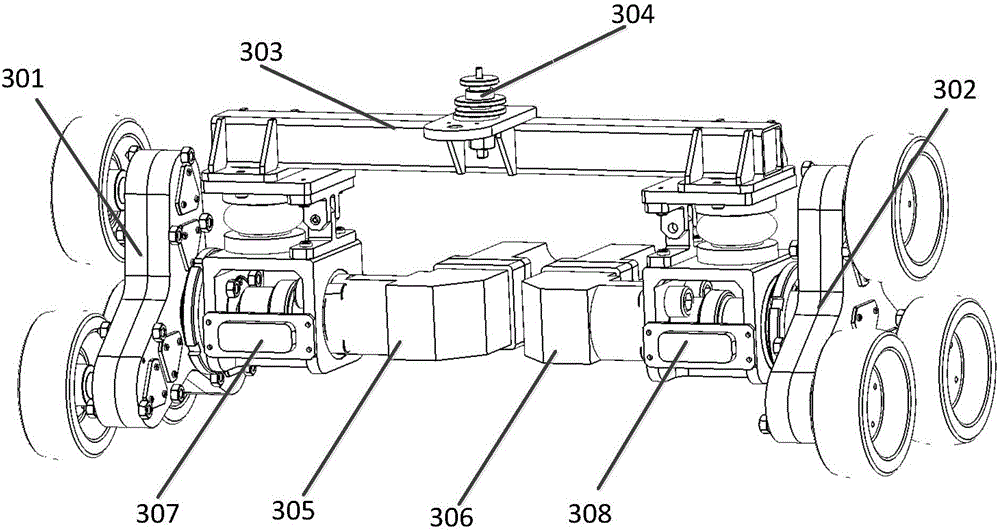
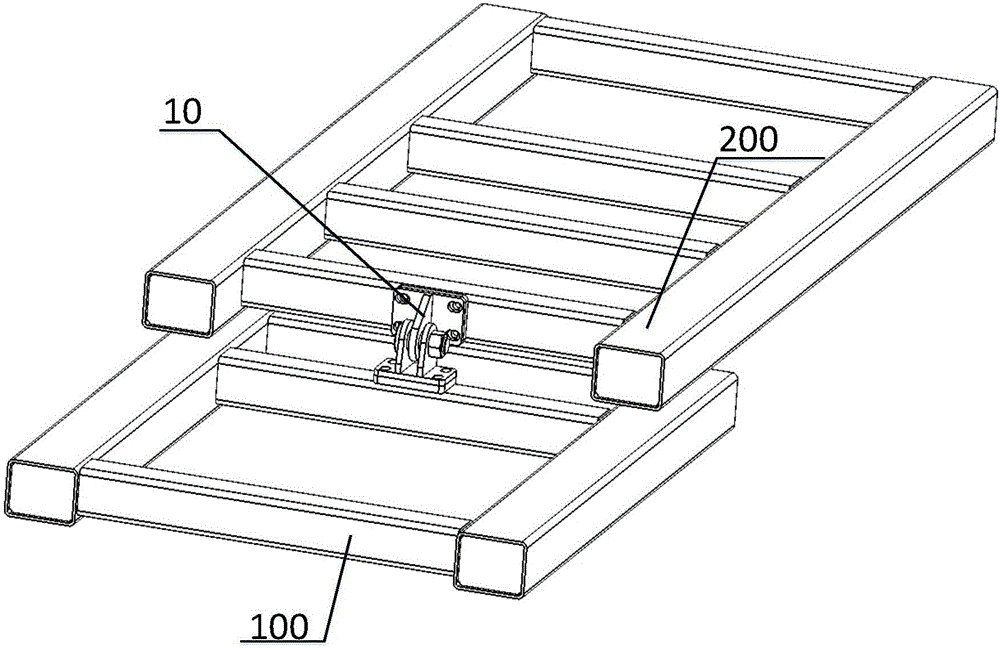
[0048] Such as Figure 1~3As shown, the planetary wheel type obstacle-surmounting robot used in the present invention includes a car body and three drive groups for supporting the car body. The car body includes a front car body 100 and a rear car body 200, and the front car body 100 passes through The horizontally arranged articulated shaft 10 is hinged on the rear body 200, and the three driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More