Magnetic-resonance compatible pneumatic puncture surgical robot
A surgical robot and magnetic resonance technology, which is applied in the field of medical equipment, can solve the problems of narrow working space of nuclear magnetic resonance instruments, and achieve the effects of convenient operation and maintenance, accurate and efficient positioning, and space saving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
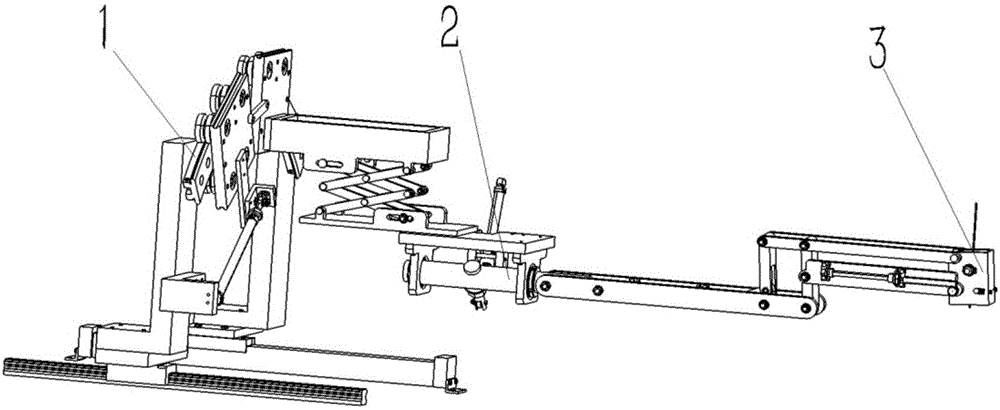
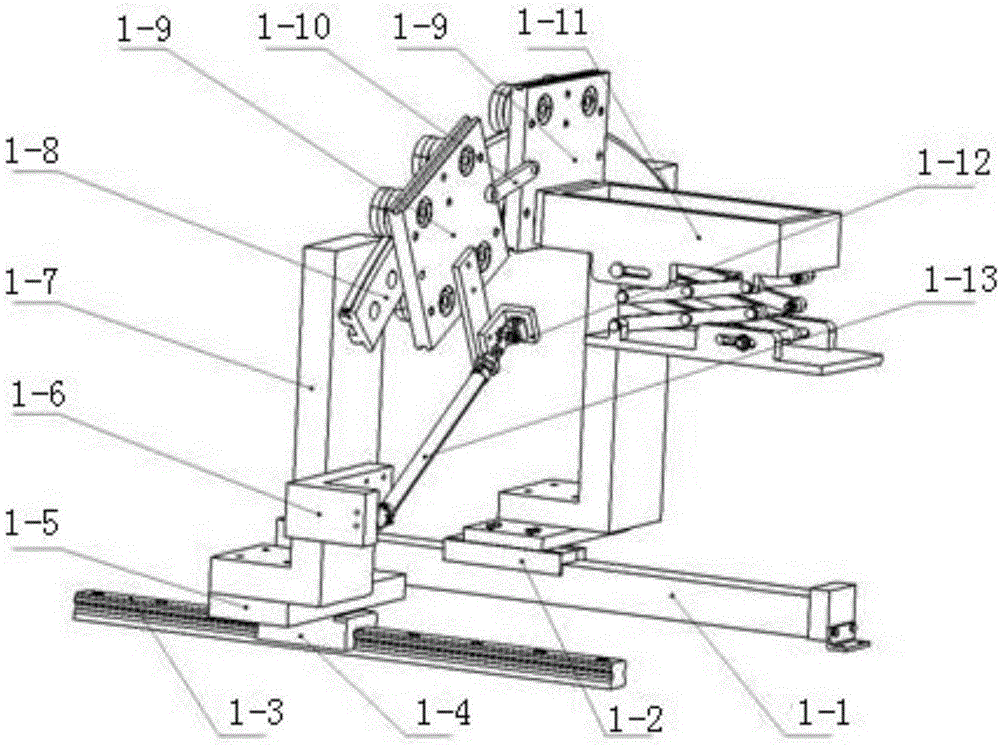
[0058] After determining the patient's puncture site, turn on the nuclear magnetic resonance (MR) equipment, and the patient lies flat on the hospital bed of the MR equipment, ready to start; the translation of the entire robot in the axial direction of the MR equipment is controlled by the rodless cylinder 1-1, and the first cylinder 1-13 controls the sliding of the annular guide rail slider 1-9 along the half annular guide rail 1-8; when the puncture site is on the other side of the patient's body, the lifting mechanism 1-11 can be exchanged for another annular guide rail slider 1-9 Above: the displacement of the puncture orientation module 2 in the radial direction of the MR equipment is controlled by the lifting mechanism 1-11. The three degrees of freedom controlled by the above three cylinders can send the apocentric point of the puncture orientation module 2 to the puncture point of the patient.
[0059] The rolling motion of the puncture needle 3-7 is controlled by the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com