

Precision Assembly Robot
A robotic and precise technology, applied in the field of robotics, can solve the problems of expensive imported industrial robots, the lack of imported robots, and the difficulty of ensuring accuracy requirements, etc., to achieve the effects of reducing human labor intensity, flexible joint movements, and a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
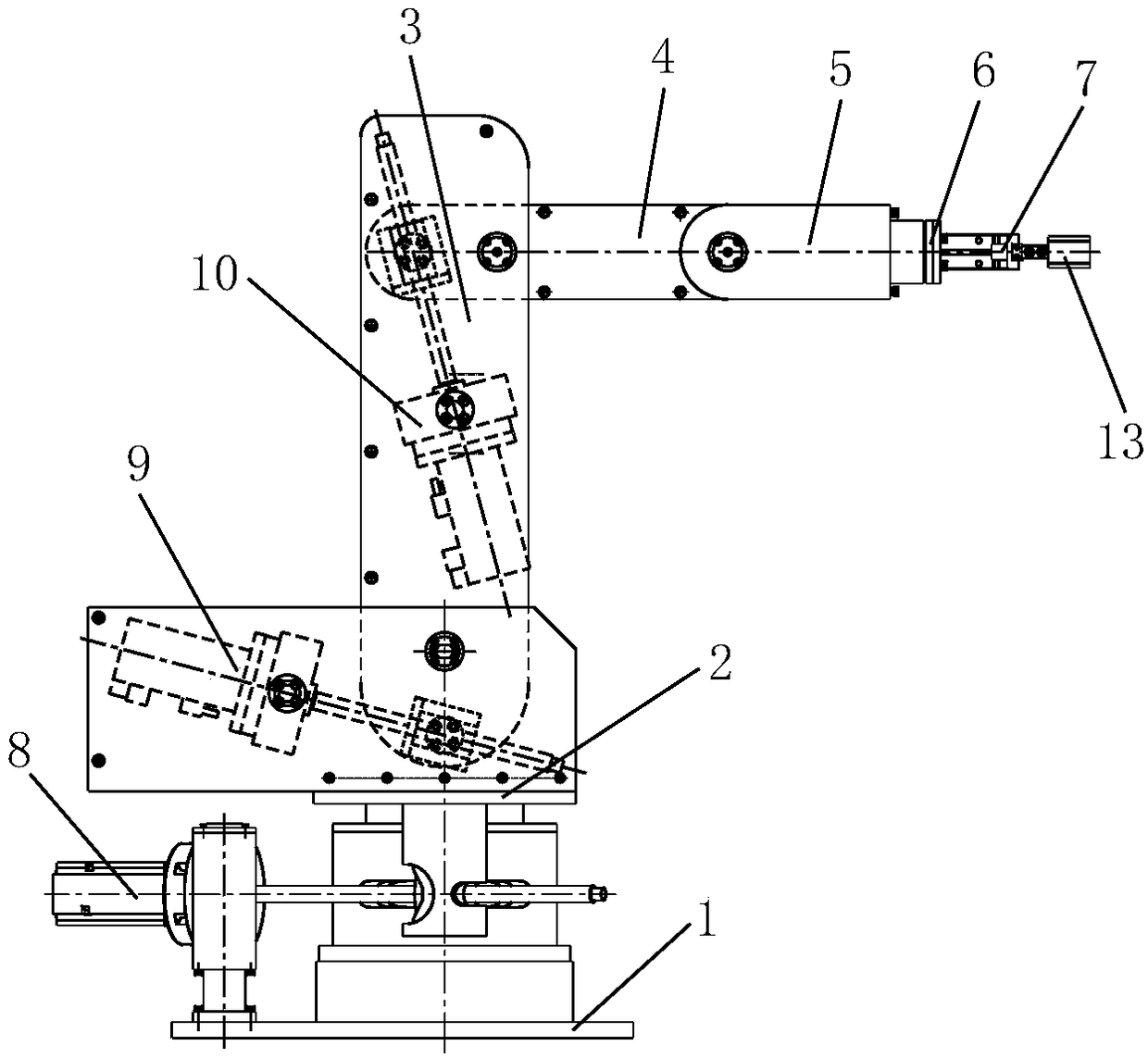
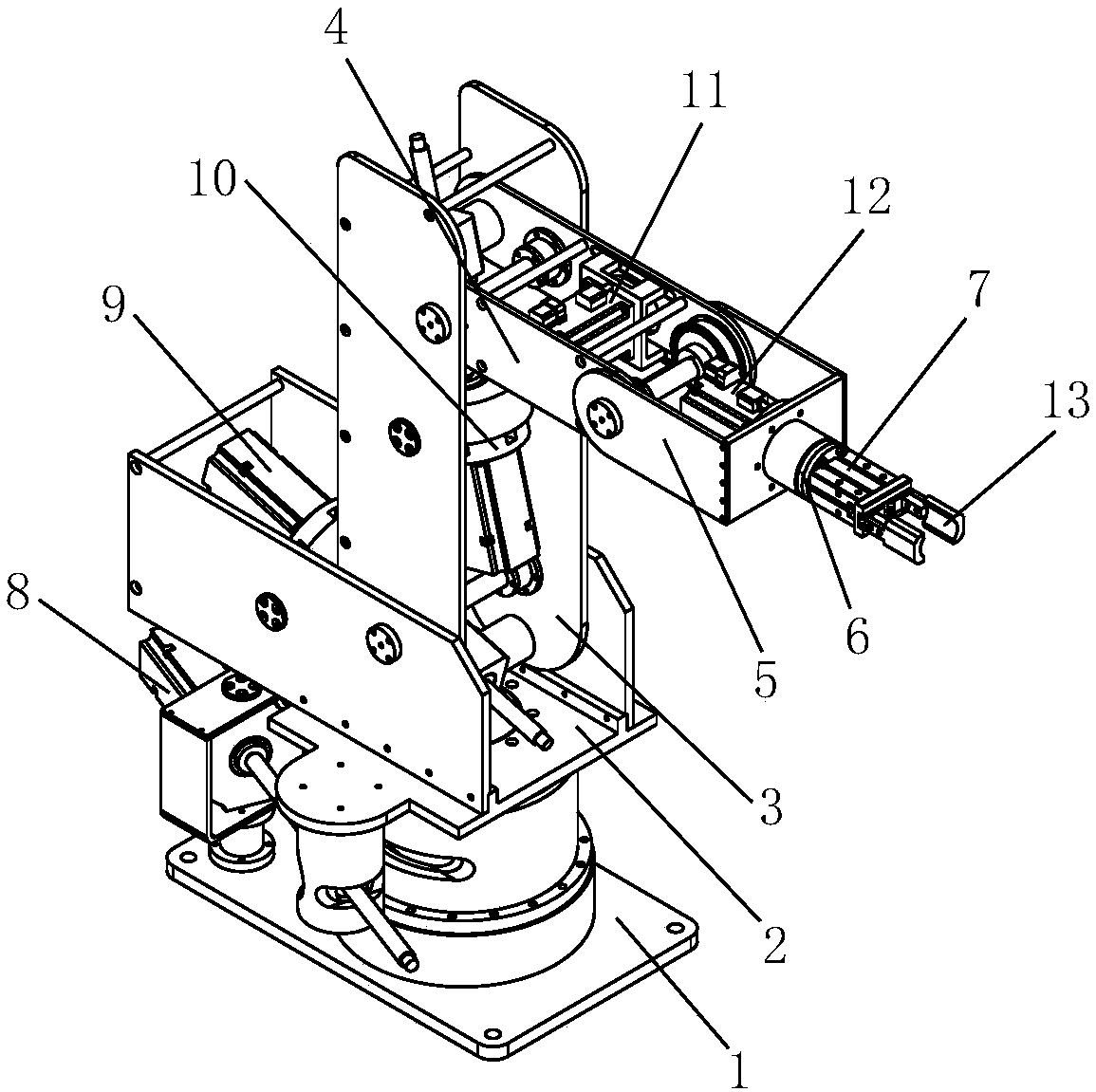
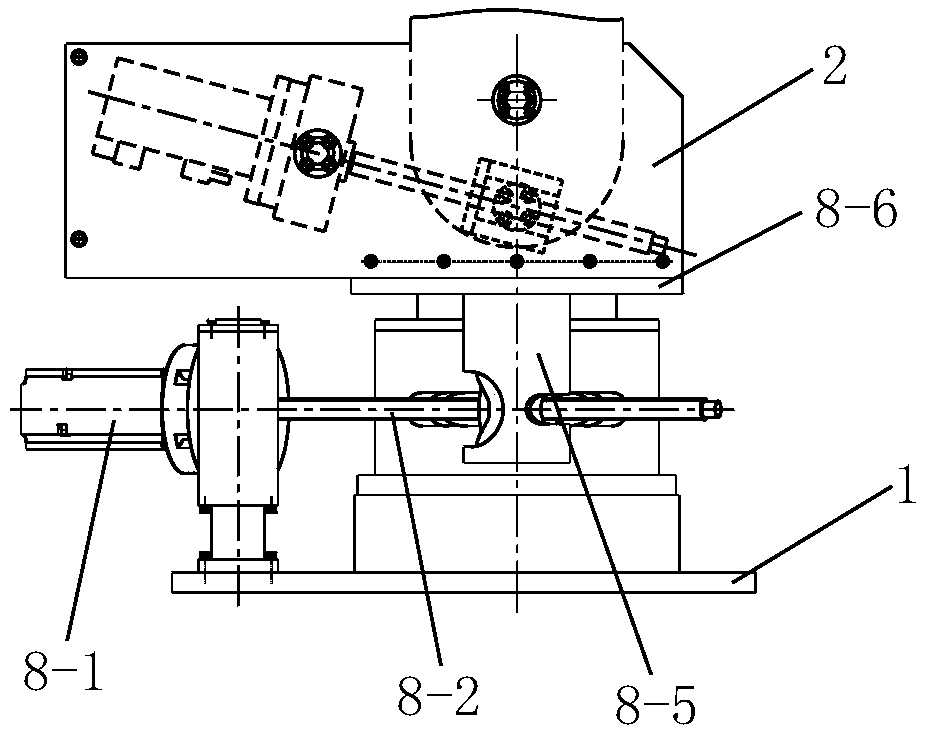
[0047] Such as figure 1 with figure 2 As shown, the present invention comprises base 1, turntable 2, big arm 3, small arm 4, wrist joint 5, front end rotary joint 6 and pneumatic clamping device 7, and described turntable 2 is rotatably installed on base 1, and described big arm One end of the arm 3 is hinged with the turntable 2, the other end of the big arm 3 is hinged with one end of the small arm 4, the other end of the small arm 4 is hinged with one end of the wrist joint 5, and the front end rotary joint 6 is rotatably mounted on the wrist The other end of the joint 5, the pneumatic clamping device 7 is installed on the outer end of the front rotary joint 6; the base 1 is equipped with a turntable ball screw drive mechanism 8 for driving the turntable 2 to rotate, and the turntable 2 is installed There is a big arm ball screw drive mechanism 9 for driving the big arm 3 to rotate, the small arm ball screw drive mechanism 10 for driving the small arm 4 to rotate is insta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More