Three-dimensional object European space reconstruction measurement system based on vision and active optics fusion
A 3D target and 3D reconstruction technology, applied in the measurement system field of 3D target European-style space reconstruction, can solve problems such as inability to measure high-pixel 3D targets, difficulty in adapting to complex environment applications, large volume, power consumption and weight, etc., to achieve Light weight, low power consumption, and the effect of less power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
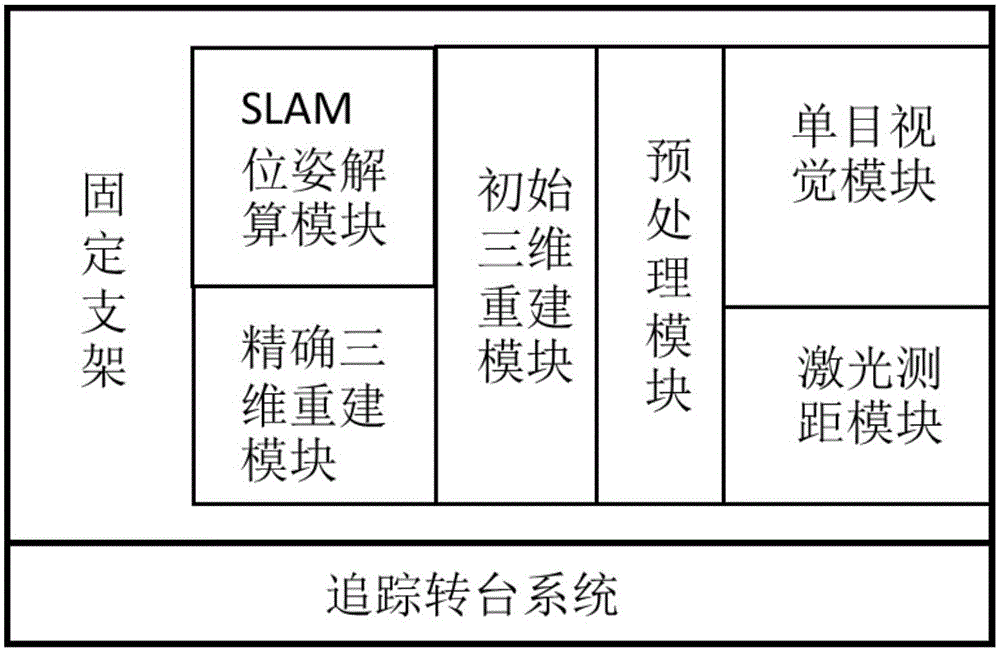
[0030] The present invention is a measurement system for three-dimensional target European space reconstruction based on vision and active optical fusion, including a monocular vision module, a laser ranging module, a preprocessing module, an initial three-dimensional reconstruction module, a SLAM pose calculation module, and an accurate 3D reconstruction Module, fixed bracket, tracking turntable system, calibration plate, of which:
[0031] The installation positions of the modules are as follows: figure 1 As shown in the schematic diagram of the module structure of the present invention:
[0032] The monocular vision module is used to capture the image of the target and the sequence information of the texture;
[0033...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More