

Automatic fast positioning system and method of pipeline block clearing robot
The technology of a pipeline robot and a positioning method is applied in the field of automatic and rapid positioning system of pipeline blockage removal robot, which can solve the problems of precise positioning, powerlessness, and high cost of components, and achieve the effects of rapid positioning, automatic positioning and strong information processing ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Below in conjunction with accompanying drawing, the embodiment of the present invention is described in detail: this specific implementation is carried out under the premise of technical solution of the present invention, has provided detailed implementation and specific operation process, but protection scope of the present invention It is not limited to the following examples.
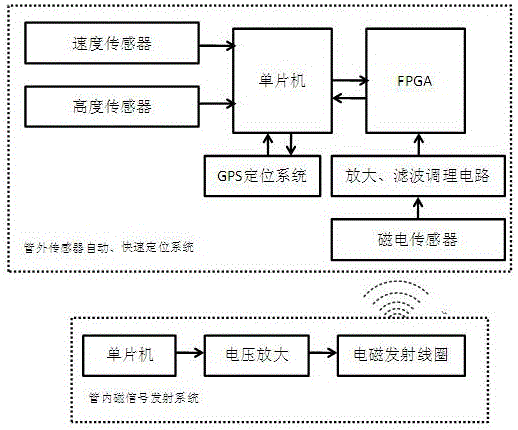
[0031] figure 1It is the basic structure diagram of the automatic and rapid positioning system of the pipeline cleaning robot, which mainly includes two parts: the low-frequency electromagnetic emission system inside the pipeline and the automatic and fast pipeline robot positioning system of the external magnetic sensor. During work, a low-frequency electromagnetic solenoid antenna transmitter is installed inside the robot in the underground pipeline, and a 2051 single-chip microcomputer is used to generate 23.5H Z The sinusoidal low-frequency signal, through the DAC conversion chip MAX541 t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More