

Improved image enhancement method based on block matching and recovery and combined trilateral steering filtering
A technology of guided filtering and image enhancement, applied in the field of image processing, can solve the problems of poor visual effect, poor preservation of structural information, loss of structural information, etc., to achieve the effect of removing pseudo-texture and noise, and achieving good visual effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
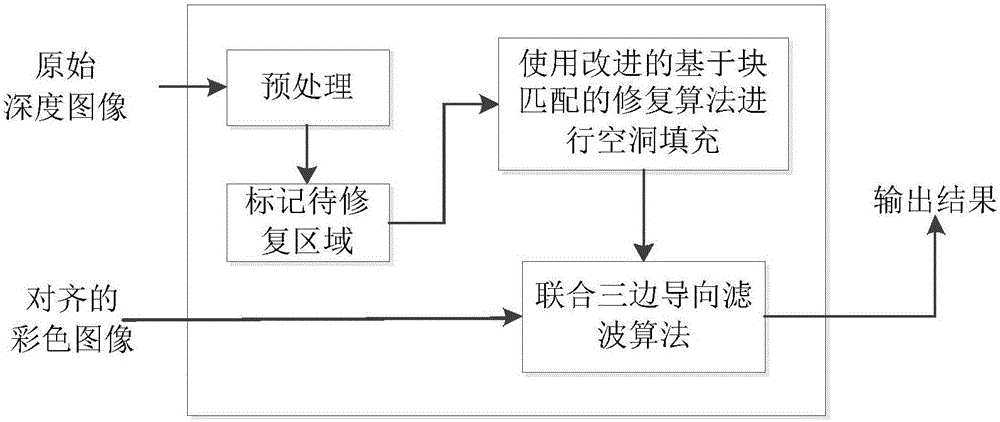
[0040] see figure 1 , the improved block matching repair of the present invention and joint trilateral guided filter image enhancement method, the enhancement process includes the following steps:
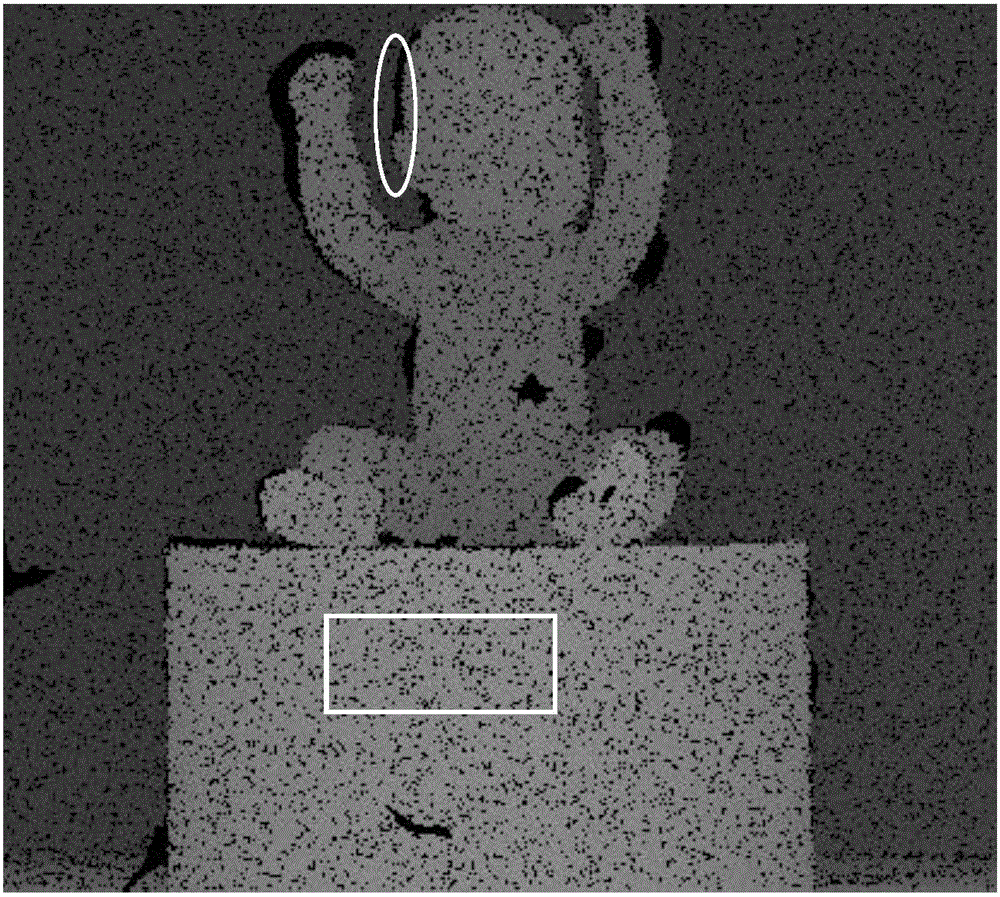
[0041] (1) Input image: input the original depth image collected and save it as a grayscale image, see image 3 . According to the Kinect image acquisition mechanism, the region formed by pixels with invalid pixel values is an unknown region, and the remaining pixels, that is, the region formed by valid pixel values, is a known region. In this embodiment, the depth image is saved as 8 bits Grayscale image, so the pixel value of the invalid pixel is 0, and the area formed by the pixels whose pixel value is not 0 is the known area.
[0042] (2) Original image preprocessing: For the collected original depth image, use the morphological closing operation to perform preprocessing to remove the random depth missing points existing in the original image; see image 3 , the pixels wit...
Embodiment 2
[0053] Improved block matching repair and joint trilateral guided filtering image enhancement method are the same as embodiment 1, wherein the block matching priority estimation function P described in step (4):
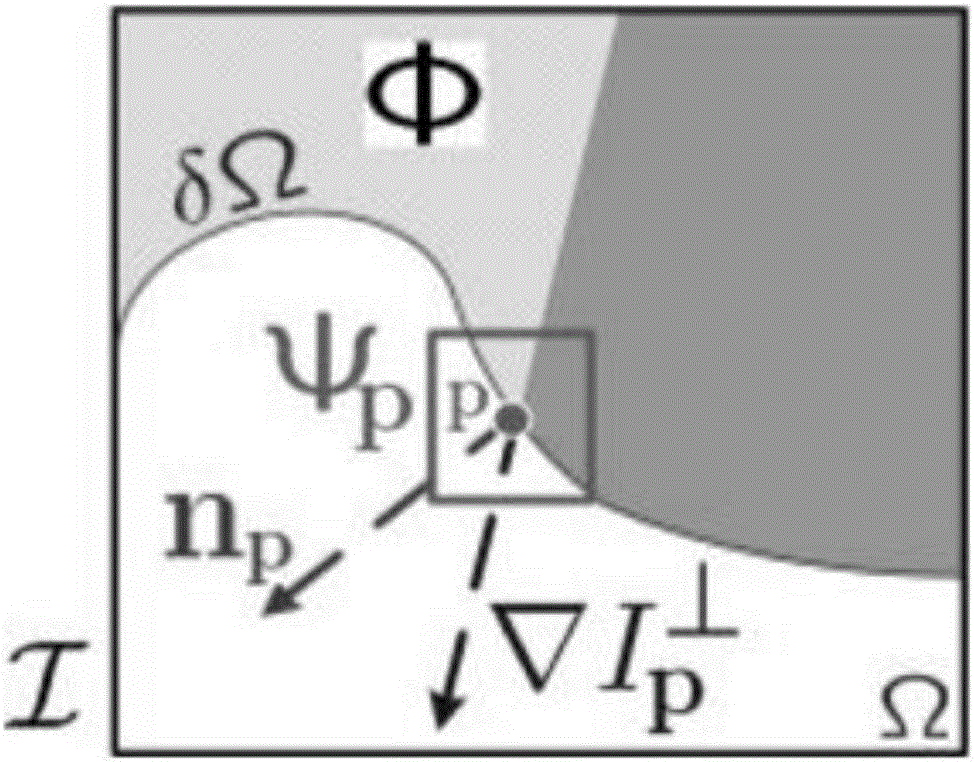
[0054] The block matching priority estimation function P(p) of each pixel point p is defined as follows:
[0055] P(p)=C(p)D(p)L(p) (1)
[0056] Among them, C(p) represents the confidence of point p, that is, the proportion of known pixels in the neighborhood centered on p. The larger the ratio, the greater the number of known pixels in the pixel block centered on p. , that is, the more known information used to predict the pixel value of an unknown pixel, the more accurate the prediction result; D(p) represents the data item of point p, ensuring that the block close to the normal direction is repaired earlier; L(p) represents The level set distance factor is defined by the diffusion time function, thus ensuring that the closer the pixel is to the boundary of the un...
Embodiment 3
[0071] Improved block matching repair and joint trilateral guided filtering image enhancement method are the same as embodiment 1-2, wherein the joint trilateral guided filtering method described in step (9):
[0072] The filtering model of the joint trilateral guided filtering method is defined as follows:
[0073]
[0074] Among them, ω p As a normalization factor, the weighted sum of each factor is guaranteed to be 1, defined as shown in formula (8); JiontTF[I] pIndicates the result obtained by filtering the pixel block I centered on p by using joint trilateral guided filtering, I is the pixel block to be repaired, and I q is the intensity value of pixel point q, s is the neighborhood centered on p; parameter σ s is the size of the Gaussian kernel in the spatial domain, Computes the Gaussian weights in the spatial domain, which, like ordinary Gaussian filters, decrease as the spatial distance between p and q increases; I cp and I cq are the pixel values of pixel ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More