

Large complex surface 3D topography robot flexible measuring system
A technology for complex curved surfaces and measurement systems, applied in the field of flexible measurement systems for large-scale complex curved surface three-dimensional topography robots, can solve problems such as inability to achieve online measurement, lack of flexibility in measuring equipment, and measurement efficiency needs to be improved, and achieves a small footprint. , the scope of work is large, the effect of improving the degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further elaborated below in conjunction with the accompanying drawings.
[0028] The robot flexible measurement system for the three-dimensional shape of large complex curved surfaces of the present invention includes an industrial robot, a robot control cabinet, a two-axis positioner, a safety light curtain, a safety fence, an IGPS transmitter and an IGPS receiver;
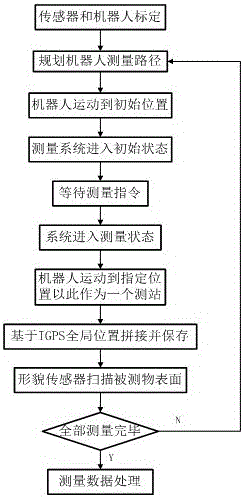
[0029] See attached figure 1 , the measurement method of this measurement system includes the following steps:
[0030] Step 1: Establish a complex surface measurement system model;
[0031] a. Establish the mathematical model of the structured light sensor in the scanning measurement system according to the measurement principle of the shape measurement sensor;
[0032] b. Establish the D-H model of the robot and the positioning error model of the robot according to the robot pose description method, and establish the hand-eye calibration mathematical model of the measureme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More