

Fully compliant pneumatic mechanical arm structure
A flexible manipulator and manipulator technology, applied in manipulators, claw arms, tools, etc., to achieve the effects of simplified manufacturing process, low development cost and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The structure of the fully flexible pneumatic manipulator of the present invention will be further described below in conjunction with the accompanying drawings. This description is only exemplary and is not intended to limit the scope of protection of the present invention.
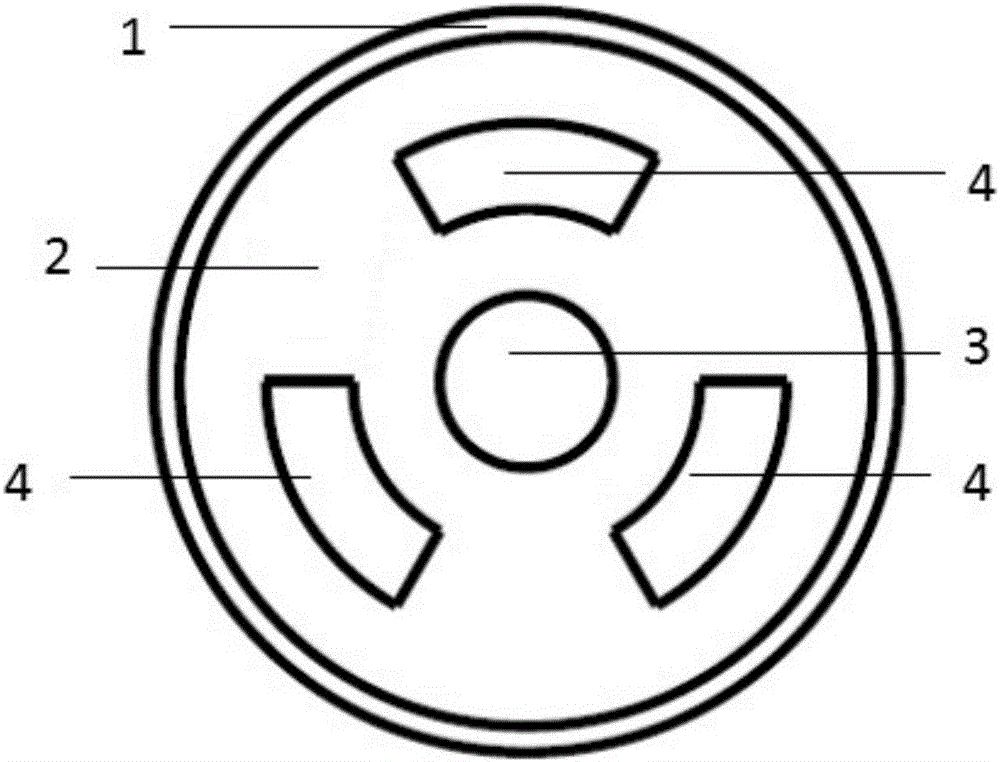
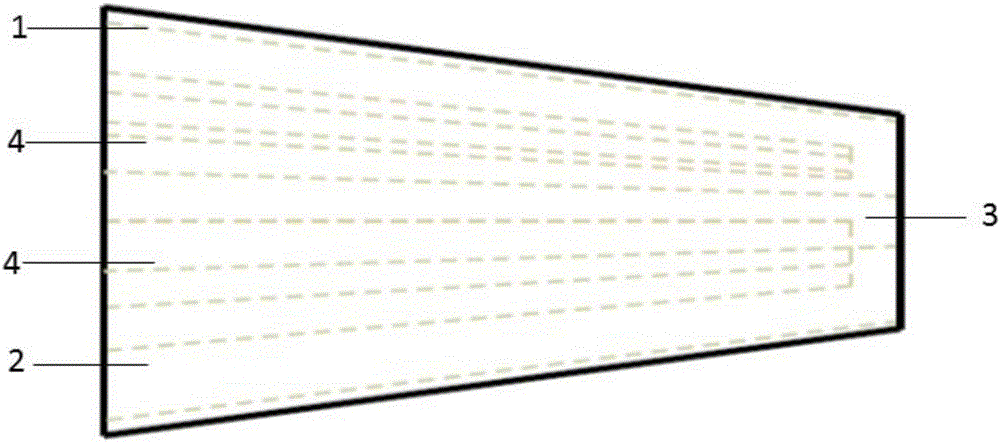
[0021] see figure 1 , figure 1 It is a schematic view of the end surface of the fully flexible pneumatic manipulator structure along the axial direction according to an embodiment of the present invention. figure 2 It is a side view of the fully flexible pneumatic manipulator structure according to an embodiment of the present invention. Among them, the structure of the fully flexible pneumatic manipulator includes the main body 2 of the fully flexible manipulator, the central body 3 of the manipulator located in the conical center of the main body 2 of the fully flexible manipulator, and the air passages evenly distributed symmetrically around the central body of the manipulator. Rubber (Ecofl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More