

Embedded measurement and control system and method for guiding robot intelligent grasping
A robot intelligence, measurement and control system technology, applied in the field of robots, can solve the problems of supplementary light source without visual sensor, difficult application in industrial sites, poor real-time performance, etc., to simplify image processing algorithms, shorten development cycle, and facilitate development and debugging Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
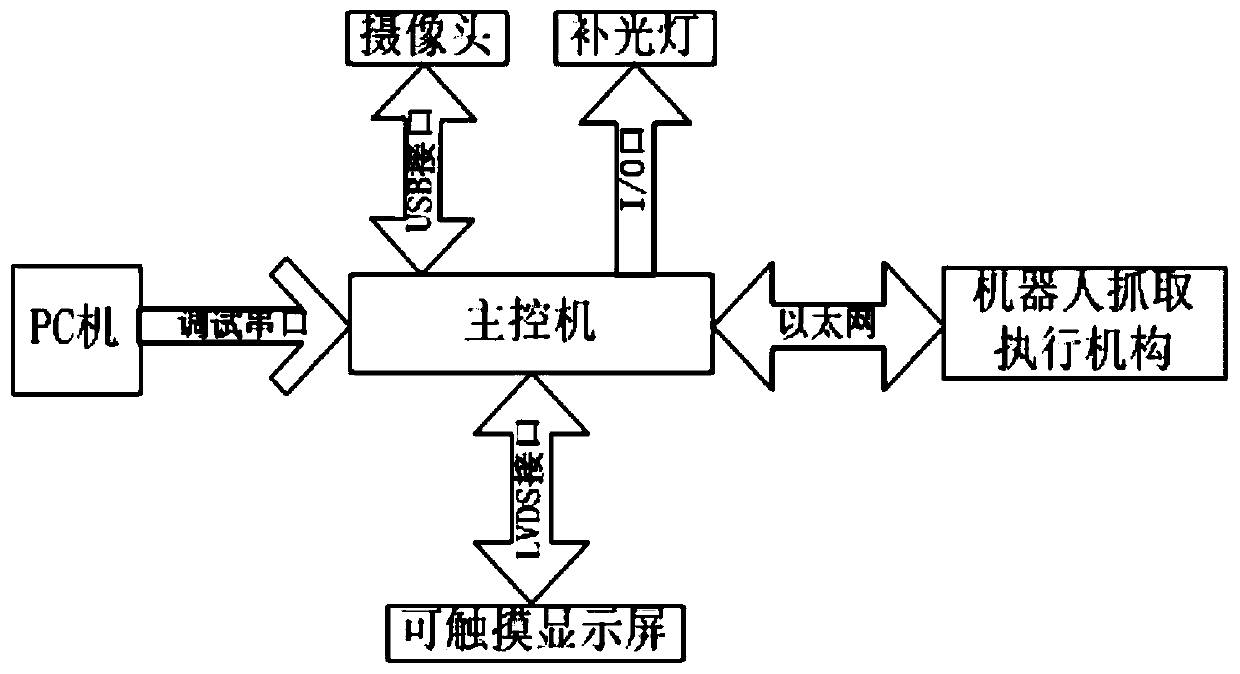
[0036] like figure 1 As shown, the embedded measurement and control system used to guide the intelligent grasping of the robot mainly includes an embedded ARM11 processor, a camera sensor module, a supplementary light source and a touchable display.
[0037] The embedded ARM11 processor is the core component of the system. Since the system is built on the basis of the ARM processor, it can transplant the mature OPENCV library. The image processing algorithm can be completed with the help of the OPENCV library, and the open source, easy-to-cut, and real-time Linux system is used. , easy to develop and debug, easy to popularize and use.
[0038] The embedded ARM11 processor is preferably the Samsung ITOP4412 core processor with strong comprehensive performance. It is a quad-core processor based on the Cortex-A9 core with a maximum frequency of 1.6GHZ. Deal with real-time requirements.
[0039] The embedded ARM11 processor is connected to the camera sensor module through the US...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More